5G sítě na míru pro komunikaci s roboty
Robotika a 5G sítě – jde to dohromady? V Centru umělé inteligence na FEL ČVUT věří, že ano. Využití 5G infrastruktury v robotických úlohách testoval na půdě Technische Hochschule Deggendorf (THD) ve Freyungu tým prof. Jana Faigla z laboratoře výpočetní robotiky. V prvotní fázi bavorsko-českého projektu pod vedením prof. Wolfganga Dornera bylo cílem ověřit, zda lze v reálném čase streamovat velká data z robotů. A to se povedlo. Z šestinohého „pavouka“ SCARAB II a čtyřnohého „psa“ SPOT tým dokázal přes 5G sítě převést do počítače raw obrázky z kamer a mračna bodů z 3D laserového dálkoměru a navíc oba roboty vzdáleně ovládat s minimální latencí.

Šestinohý SCARAB II a čtyřnohý SPOT jsou doma v laboratoři výpočetní robotiky Centra umělé inteligence FEL ČVUT. SCARAB připomínající vzhledem pavouka a pohybem mravence vznikl kompletně v naší laboratoři s využitím 3D tisku. Robopes SPOT z dílny Boston Dynamics byl zas doplněn o nástavbu se senzory a dalším zařízením.
Na projektu je unikátní to, že výzkumníci nevyužívají 5G služby od velkých operátorů – vyvinuli vlastní řešení. Tato infrastruktura je sestavena pomocí standardních síťových prvků, soukromé šířky pásma a softwaru Open Air Interface, který je volně dostupný. A výsledky jsou velmi slibné! Infrastruktura vyniká velkou škálovatelností a hlavně stabilitou připojení, které umožňuje např. streamování videa v raw kvalitě s minimální latencí.
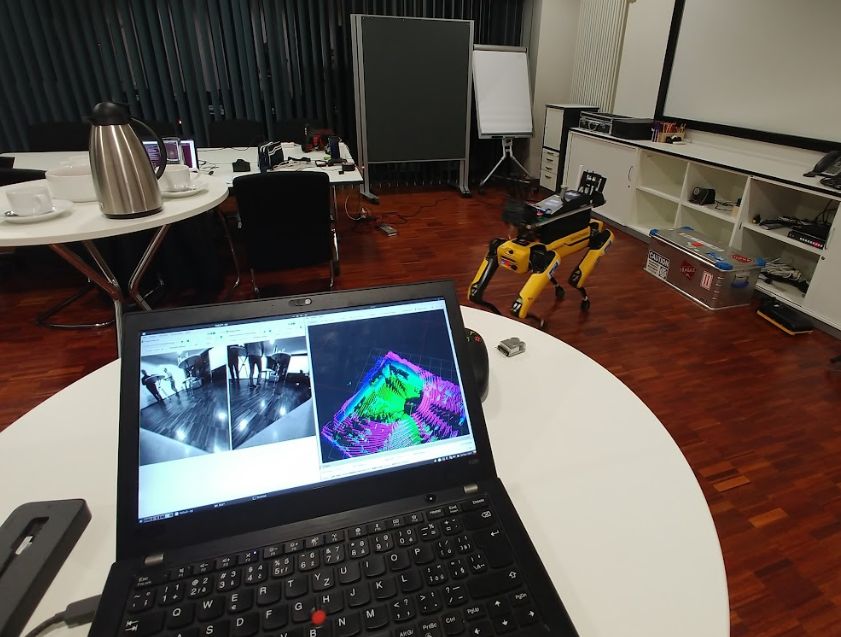
Data z robotu se přenášejí do počítače po komunikační infrastruktuře 5G sítí THD. Při přenosu nedochází ke kompresi dat a zároveň jsou okamžitě k dispozici pro další zpracování a výpočty mimo roboty.
Zdařilé testování a benchmarkování řízení je zásadní pro další pokračování projektu. Technologie 5G sítí nám totiž v budoucnu umožní sbírat data v autonomních robotických misích, kde není možné či žádoucí provádět složité datové operace přímo na robotech. Vzdálené zpracování dat je navíc výkonnější a umožňuje vyšší míru flexibility.
Předvídané možnosti 5G a 6G sítí pak také slibují vytváření dynamické komunikační infrastruktury tam, kde není k dispozici. S využitím vlastní 5G infrastruktury se tak otevírá možnost jejího nasazení také v jinak komunikačně nepřístupných místech, jako jsou podzemní prostory, nebo lokality postižené živelnými katastrofami (zemětřesení, tornádo, záplavy ad.).

Situaci, která vyžaduje nasazení multirobotických systému, věrně simuluje soutěž DARPA SubTerranean Challenge, které jsme se v minulých letech účastnili. Jejím cílem je pomocí robotů lokalizovat ukryté předměty v podzemním důlním komplexu.
Představte si například situaci, kdy se hasiči nemohou dostat k obětem zřícené budovy. Rychlé obnovení komunikační infrastruktury s vysokou propustností tuto nouzovou situaci řeší. Roboty mohou terén zmapovat, poslat velká data operátorům a nahlásit umístění zraněných jedinců, za kterými mohou být cíleně a efektivně vysláni záchranáři. Vlastní mobilní 5G sítě tedy mohou figurovat v záchranných misích. Náš projekt je první vlaštovkou.

Jan Faigl (FEL ČVUT) a Siegfried Rödel (Technische Hochschule Deggendorf)
Převzato z AIC FEL ČVUT