DARPA SubT Challenge
Roboty na značky… Připravit… Start! V USA právě probíhá finále “robotické olympiády” DARPA Subterranean Challenge, ve které se o zlato utká také tým CTU-CRAS-NORLAB složený z vědců a studentů FEL ČVUT. Soutěžící z celého světa se 21. až 24. září 2021 potkají v podzemním komplexu MegaCavern v Kentucky, aby poměřili síly v robotice. Úkolem je vyslat autonomní roboty do jeskyně a identifikovat co nejvíce rozmístěných předmětů.
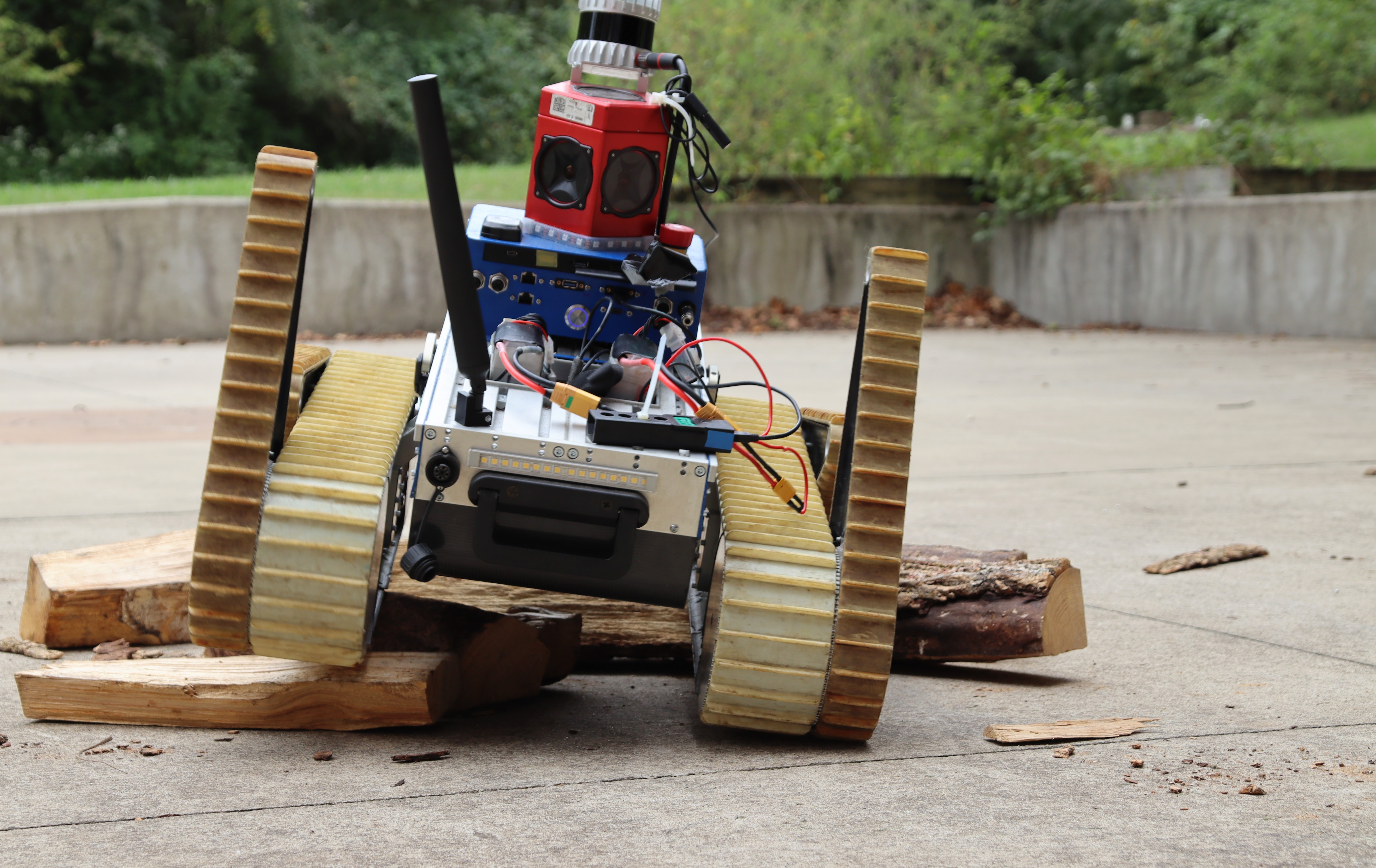
CTU-CRAS-NORLAB bude na finále SubT Challenge obhajovat třetí místo z předchozích dvou kol, v nichž jsme se prosadili v konkurenci týmů z prestižních výzkumných institucí (mimo jiné NASA, MIT, CalTech, Oxford či ETH Zürich) jako nejlepší tým bez financování americkou agenturou ministerstva obrany (DARPA). Šance na výhru se navíc dramaticky zvýšila. Naše flotila kolových, pásových, létajících a šestinohých robotů má totiž novou posilu v podobě robotického psa jménem SPOT od Boston Dynamics. Rozhodující však bude, do jaké míry se soustavě robotů podaří efektivně vyměňovat informace v prostředí, kde chybí GPS signál a dosah bezdrátové komunikace je značně omezený... Tak nám i robotům držte palce!
DARPA den po dni
Přípravy ("Den 0")
Na finále DARPA Subterranean Challenge se náš tým připravoval a těšil prakticky celý rok. Před odletem jsme roboty několikrát testovali v komplexu jeskyně Býčí skála v Moravském krasu, abychom je co nejlépe připravili na podmínky, které je čekají v USA.







Nyní jsme se přemístili na americké poměry “blízko” samotnému místu konání soutěže, jen slabou hodinku jízdy autem. Přesun z Prahy byl hladký, tým přijížděl na etapy, ale nyní je již kompletní. Cesta byla dlouhá a náročná, ale nakonec nám to celkem uteklo. Letiště jsou stále ještě poloprázdná, ve frontě “foreign citizens” na pasovou kontrolu při příletu do USA nás bylo všeho všudy devět. Doprava robotů byla rychlá a bezproblémová. Po příletu jsme dokonce zvládli i zařídit záruční opravu jednoho SPOTa, z Kentucky je to do Bostonu přeci jen blíž než z Prahy.
Přípravy vrcholí, roboty kmitají o sto šest, napětí z očekávání vzrůstá. Také roste únava, mnohdy testujeme roboty pozdě do noci. Má to ale i své výhody, protože v noci lépe nasimulujeme reálné podmínky, které naše roboty v podzemí čekají. Uvidíme, co přinesou další dny, ale zatím si udržujeme dobrou náladu a chuť do práce.











Co jste možná nevěděli…
… Nákup pro 22 lidí zaplní celou korbu amerického pick-upu.
… Steaky se vám po několika dnech prostě přejí a už je nechcete ani vidět.
… SPOT je prakticky obojživelník. Vydal se sám na průzkum koryta blízkého potoka, který je v současné době jen sadou propojených louží.
… I roboti občas potřebují na operační stůl. Dobrá zpráva je, že operace proběhla bez komplikací a že pacient přežil.




Den 1 - 21. 9.
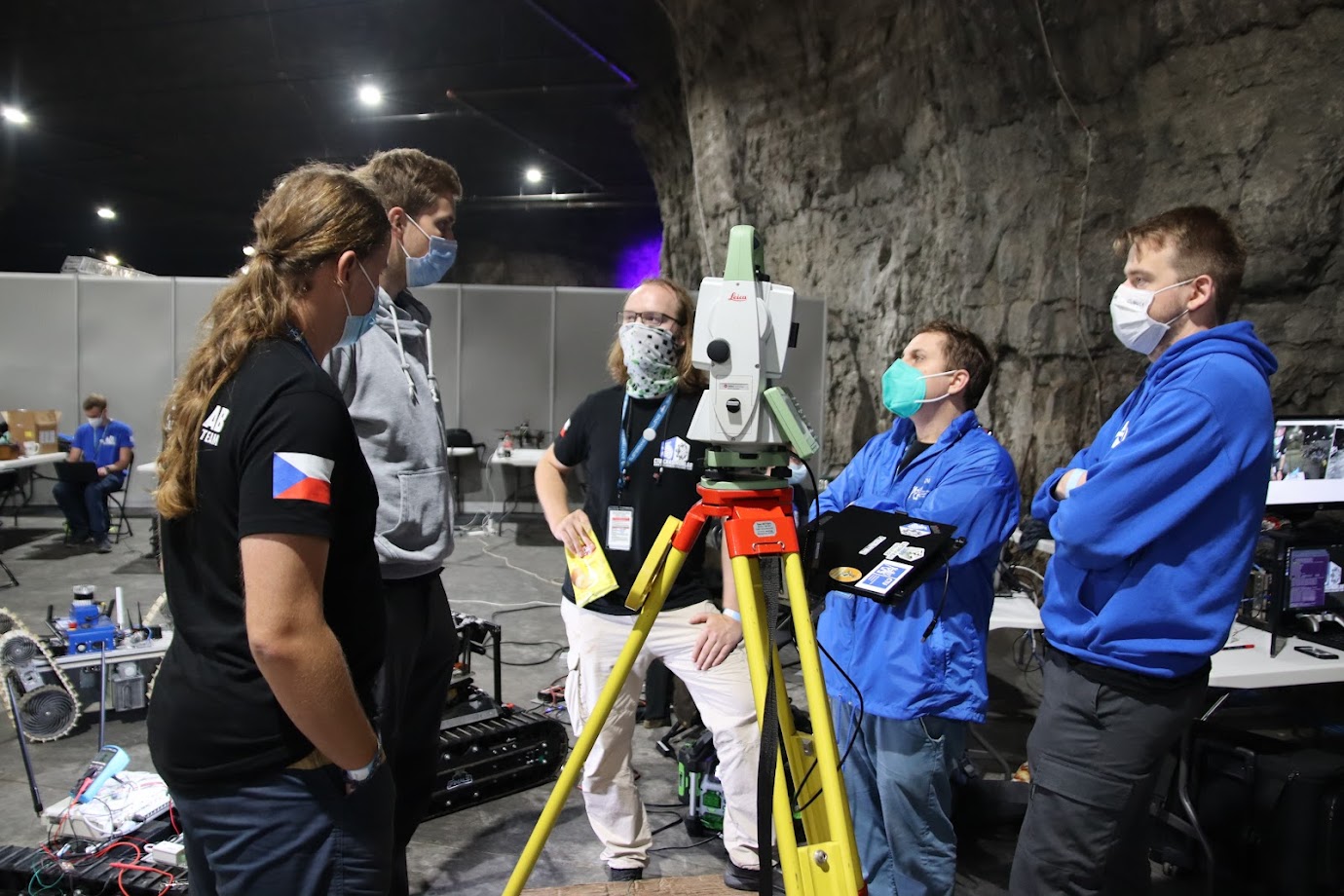
Dnes už jsme navštívili jsme lokaci finálového kola soutěže, obrovský důlní komplex Mega Cavern. Jedná se o bývalý podzemní vápencový důl v Louisville, Kentucky, který se rozprostírá pod dálnicí a místní zoo. V současnosti ho využívají firmy např. jako sklad. Zavítat sem ale mohou i turisté, kteří se v rámci komentované prohlídky mohou projet důlními vozíky. A průvodců je tady třeba! Člověk zde totiž snadno zabloudí po prvních pár zatáčkách. Trochu to připomíná Morii z Pána prstenů...
Pracovní prostory pro týmy jsou velmi dobře připraveny, dostatek místa, elektřiny i datového propojení s vnějším světem. Zároveň jsou týmy částečně oddělené neprůhlednými stěnami. Na vstupu do jeskyně je kontrola osob, každé ráno se bezdotykově měří teplota. Anti-covid opatření včetně doporučeného odstupu od osob jsou zdůrazňována stále. Obličejové roušky jsou požadovány po celou dobu pobytu v jeskyni, dokonce i pro pit crew a lidského operátora během mise. Což, s ohledem na vysokou vlhkost, přináší nemalé nesnáze především obrýleným členům týmu.





Den 2 - 22. 9.
Atmosféra v týmu je i přes vzrůstající spánkový deficit stále velmi dobrá. Jak jsou na tom ale naši závodníci? Roboty prošly technickou přejímkou celkem bez problémů, všechny se poslušně zastavily, když je o to DARPA technik na dálku požádal. V kontrastu s předchozími koly probíhá tato bezpečnostní kontrola před každou misí. Roboty jsou zatím v pořádku, občas se jim nechce vstát, ale zatím se daly vždy přesvědčit.
Testovaní a ladění probíhalo do poslední chvíle, což negativně ovlivnilo souhru týmu na startu. Ladění startovací procedury jsme věnovali velkou část odpoledne po první zkušební půlhodinové misi. Ačkoli jsme záměrně nenasadili úplně všechny roboty, zkusili jsme každý typ. A zdárně! Všechny typy robotů vjely, resp. vlétly do mise a našly objekty. Jeden ze SPOTů se na konci průzkumu vrátil pokojně zpět na start. Terén je velmi obtížný a stísněný. Organizátoři do jeskyně v zásadě vestavěli prostředí odpovídající všem třem předchozím kolům soutěže a podmínku jsou náročnější ve všech ohledech.




Den 3 - 23. 9.
Dojmy z dnešního soutěžního dne jsou smíšené. Při druhém testovacím dni se nám povedlo nasadit jen část robotů kvůli nejrůznějším technickým obtížím. Pracovali jsme usilovně na odstranění, včetně noční výměny 3D Lidaru za náhradní. Využili jsme i služeb přítomných zástupců Boston Dynamics, kteří na místě opravili jednoho z našich Spotů, který onemocněl. Práce se vyplatila.
Přes veškeré nasazení týmu v posledních týdnech a dnech se úplně dohnat zpoždění dodávek nepovedlo a několik celo-systémových přípravných testů prostě chybělo. V tom měly ostatní týmy navrch, byly připraveny lépe. Musíme ještě podrobně prozkoumat data, která roboti během soutěžní mise nasbíraly, a poučit se z nich.





Den 4 - 24. 9.
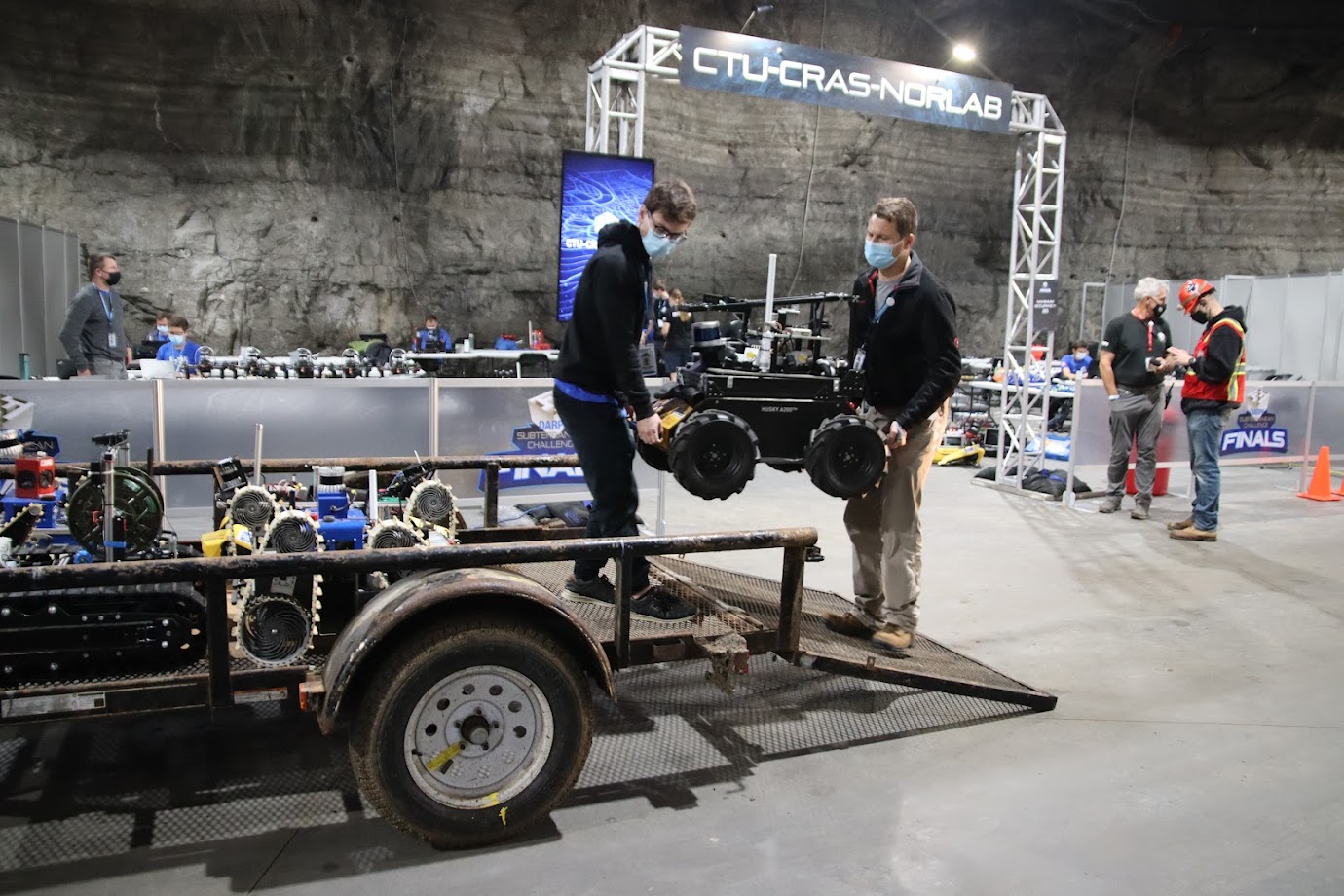
Během včerejšího soutěžního kola se povedlo poslat do jeskyně kompletní sadu našich robotů. Šest pozemních, tři létací a ještě ručně řízený robot sloužící jako motorizovaná základna mobilního spojení. Roboti pracovaly i mimo spojení, plně autonomně. To je určitě úspěch. Na druhou stranu některé z pozemních robotů zkoumaly podzemní prostory způsobem, který byl daleko od optima. Podařila se ale integrace, nalezené objekty reportovaly roboti všech typů.




Shrnutí
Soutěž DARPA Subterranean Challenge je u konce. Skončili jsme na 6. místě v nasazení reálných robotů a 2. ve virtuálním prostředí, které probíhá v robotickém simulátoru. To pro nás bylo milým překvapením, protože jsme se primárně soustředili na fyzické prostředí. Mezi deseti nejlepšími robotickými týmy světa nám druhé místo přineslo odměnu 500 000 dolarů. A odvážíme si i sadu velmi cenných dat z podzemního komplexu, která využijeme při budoucím výzkumu robotů samotných i multirobotických soustav.
Členové týmu
Silný tým CTU-CRAS-NORLAB tvoří vědci a studenti z výzkumných skupin katedry kybernetiky a katedry počítačů FEL ČVUT.
Vidění pro roboty a autonomní systémy (VRAS)
Tomáš Svoboda - vedoucí skupiny
Karel Zimmermann
Vojtěch Šalanský
Teymur Azayev
Bedřich Himmel
Martin Pecka
Tomáš Petříček
Artificial Intelligence Center FEE CTU (AIC)
Multi-robotické Systémy (MRS)
Martin Saska - vedoucí skupiny
Vít Krátký
Daniel Heřt
Pavel Petráček
Tomáš Báča
Matěj Petrlík
Tomáš Musil
Yurii Stasinchuk
Northern Robotics Laboratory (NORLAB)
François Pomerleau - vedoucí skupiny
Vladimír Kubelka
Maxime Vaidis
Olivier Gamache
Simon-Pierre Deschênes

Fotografie týmu z minulých ročníků:
únor 2020 - Urban Circuit
září 2019 - Tunnel Circuit

O soutěži DARPA SubT Challenge
DARPA(Defense Advanced Research Projects Agency) je americká agentura, která pomáhá rozvíjet průlomové technologie v oblasti bezpečnosti.
Cílem soutěže DARPA SubT Challenge je vyvinout inovativní technologie, které dokážou rychle mapovat, navigovat a prohledávat složitá podzemní prostředí, jako jsou lidmi vytvořené systémy tunelů, městské podzemí a přírodní jeskynní sítě. Týmy soutěží tak, že předvedou, jak si jejich schopnosti autonomie, propojení, vnímání a mobility vedou buď na fyzických hřištích v systémové soutěži (Systems Competition), nebo v simulovaných prostředích ve virtuální soutěži (Virtual Competition).
V posledních dvou letech se týmy potýkaly s řadou předběžných okruhů - Tunelový okruh, Městský okruh a Jeskynní okruh - aby předvedly, jak jejich řešení řeší jedinečné výzvy jednotlivých dílčích oblastí. Nyní budou týmy řešit soutěžní tratě, které zahrnují náročné prvky ze všech tří subdomén najednou.
Pro účast v soutěži musí týmy nasadit autonomní robotické systémy - ať už skutečné, nebo virtuální - na soutěžní tratě, aby mapovaly, navigovaly a hledaly artefakty. Umístění každého artefaktu musí být nahlášeno s přesností alespoň pět metrů, aby bylo možné získat bod. Soutěžní tratě jsou záměrně navrženy tak, aby napodobovaly nebezpečí záchranných prací v zavalených dolech, pátrání a záchranu po zemětřesení v městském podzemí a jeskynní záchranné operace pro zraněné nebo ztracené hledače.
Finále soutěže s výhrou až 2 milionů dolarů se koná v Louisville Mega Cavern ve státě Kentucky.
Kontakt pro média
Obracejte se prosím na PR FEL:
Radovan Suk
pr@fel.cvut.cz