Centrum umělé inteligence (AIC)
Katedra počítačů, Karlovo náměstí 13, Praha 2
Kdo jsme?

Michal Pěchouček - Spoluzakladatel a ředitel centra
Centrum umělé inteligence (AIC) na FEL ČVUT založil v roce 2001 prof. Michal Pěchouček se svými kolegy a doktorandy. Od té doby si centrum vybudovalo pověst uznávaného vědeckého pracoviště s důrazem na aplikovatelnost. Tým více než 70 vědců a studentů z celého světa se dnes věnuje bezmála 30 atraktivním projektům, které jsou financované tuzemskými i mezinárodními grantovými agenturami, EU, USA i průmyslovými partnery (Google, ŠKODA AUTO, Honeywell, Siemens, Continental’s, Bell ad.). S několika firmami centrum založilo společné výzkumné laboratoře (největší je Avast AI & Cybersecurity Lab zaměřená na kyberbezpečnost). Cílem AIC je řešit problémy reálného světa skrze špičkový výzkumu umělé inteligence a vývoj inovativních technologií. Zaměřuje se pak především na moonshoty neboli důležité výzvy, kterým bude naše společnost čelit za 10 až 20 let, a vyvíjí nutné vědecké nástroje a poznání pro jejich úspěšné řešení.
Jakým výzkumem se zabýváme
Výzkum AIC se zaměřuje především na následující oblasti a aplikační domény umělé inteligence:
- Výpočetní robotika
- Kyberbezpečnost
- Teorie her
- Automatické plánování
- Inteligentní doprava
- Optimalizace
- Strojové učení
K čemu to je
Naše algoritmy se uplatní například při simulaci vhodnosti výrobní technologie před jejím vlastním nákupem, rozpoznávání prostředí a plánování společných akcí skrze kooperaci pozemních robotů a dronů, simulaci a plánování dopravních a přepravních úloh, zajišťování bezpečnosti a vysvětlitelnosti AI systémů, optimalizaci reálných úloh, řešení zabezpečení na internetu, asistenci žurnalistům v práci a mnoho dalšího. Rádi vytváříme společné výzkumné laboratoře s průmyslovými partnery, kterým pomáháme zvětšovat konkurenční náskok.
Na čem konkrétně pracujeme (výběr projektů)
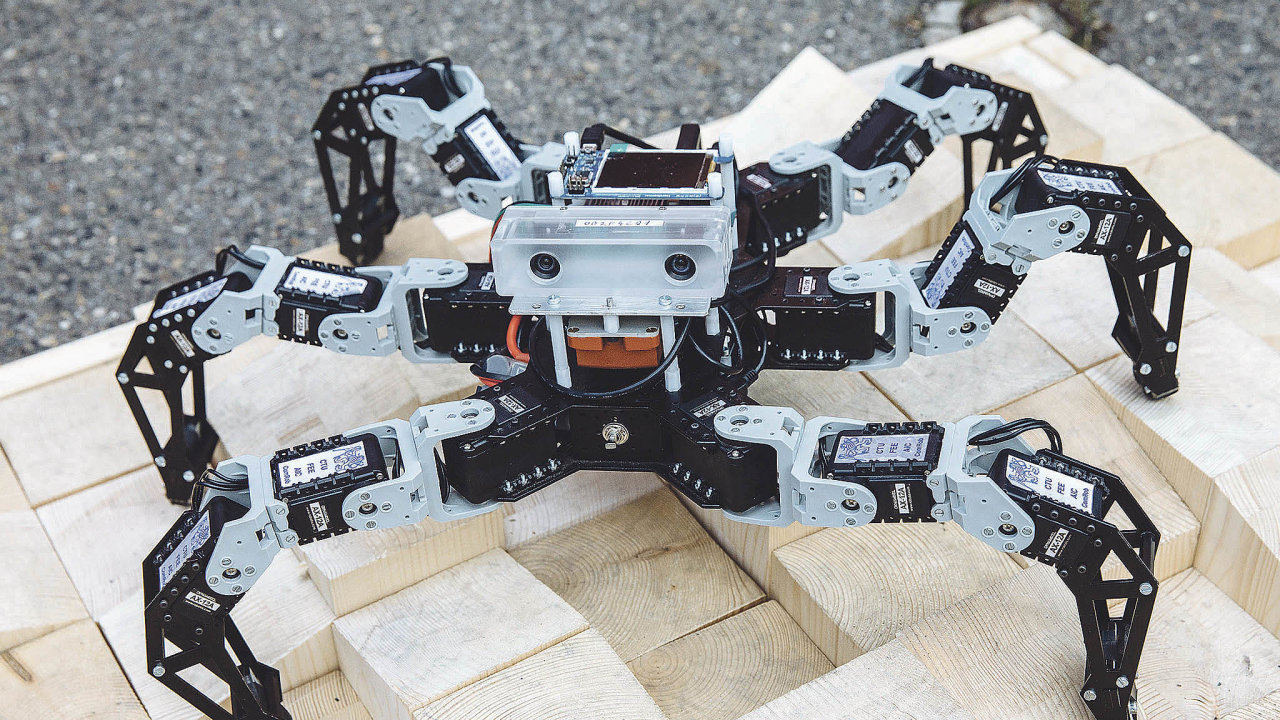 Aktivní modelování prostředí mobilními roboty
Aktivní modelování prostředí mobilními roboty
Autonomní mobilní roboty mohou provádět úkoly v prostředí, které je nebezpečné nebo jinak nevhodné pro člověka, jako jsou zřícené budovy nebo jeskyně. V našem výzkumu vyvíjíme modely a algoritmy pro predikci průchodnosti terénem, které mohou v budoucnu pomoci např. záchranářům při živelných katastrofách. Využíváme k tomu jak zkušeností robotů s prostředím, tak i kombinaci exteroceptivního a proprioceptivního snímání. Tyto modely byly již v minulosti nasazeny na našich robotech během prestižní robotické soutěže DARPA Subterranean Challenge, kde se náš tým ve všech kolech umístil na předních příčkách.
 Dobíjecí stanice EV flotily ŠKODA AUTO
Dobíjecí stanice EV flotily ŠKODA AUTO
AIC již řadu let úzce spolupracuje se ŠKODA AUTO na řešení několika problémů spojených s automobilovým průmyslem. V tomto projektu jsme se zaměřili na výzvu spojenou s EV flotilou využívanou zaměstnanci automobilky. Za úkol jsme měli určit optimální rozložení nabíjecích stanic pro elektroauta v prostředí továrny. Využili jsme k tomu metody umělé inteligence, matematické optimalizace a simulace založené na reálných datech. Vedle výpočtu jsme také vyvinuli vizualizační nástroj pro podporu rozhodování, abychom managementu pomohli pochopit efektivnost a nedostatky různých řešení při umisťování více než 500 nabíjecích míst do konce roku 2021.
 Žurnalistika s umělou inteligencí
Žurnalistika s umělou inteligencí
Jak vypadá budoucnost žurnalistiky při zavedení umělá inteligence? Automatické generování zpráv, ověřování faktů, vyhledávání článků potvrzujících či vyvracejících tvrzení. Tyto a další témata zkoumají naši výzkumníci v novém TAČR projektu „Proměna etických aspektů s nástupem žurnalistiky umělé inteligence“ společně s Karlovou univerzitou (jako hlavní řešitel zastoupená Václavem Moravcem), Západočeskou univerzitou v Plzni a řadou aplikačních partnerů jako ČTK, Česká televize a s aplikačním využitím u dalších partnerů jako Newton Media.
 Využití teorie her v adversariálním strojovém učení
Vztah kyberútočníka a ohroženého uživatele lze modelovat pomocí herně-teoretického rámce. Ten modeluje cíle a možné budoucí akce protivníků stejně jako v řadě dalších her, které oblast teorie her primárně zkoumá (go, šachy, poker, počítačové hry). V tomto projektu financovaném Army Research Office se snažíme pomocí algoritmů teorie her zvýšit robustnost metod strojového učení a z dlouhodobého hlediska významně přispět ke zdokonalení systémů kybernetické bezpečnosti.
Využití teorie her v adversariálním strojovém učení
Vztah kyberútočníka a ohroženého uživatele lze modelovat pomocí herně-teoretického rámce. Ten modeluje cíle a možné budoucí akce protivníků stejně jako v řadě dalších her, které oblast teorie her primárně zkoumá (go, šachy, poker, počítačové hry). V tomto projektu financovaném Army Research Office se snažíme pomocí algoritmů teorie her zvýšit robustnost metod strojového učení a z dlouhodobého hlediska významně přispět ke zdokonalení systémů kybernetické bezpečnosti.
 Projekt Aposemat
Projekt Aposemat
Internet věcí (Internet of Things) představuje pro uživatele jednu z největších hrozeb kybernetických útoků z důvod nedostatečného zabezpečení. Společně s průmyslovým partnerem Avast přispíváme k ochraně IoT zařízení pomocí analyzování, provádění a detekce útoků a malwaru. Projekt využívá skutečná zařízení chytré domácnosti včetně routerů, Raspberry Pi, Alexa a dalších zařízení, která jsou velmi často infikována počítačovými viry a napadána útočníky.
Financování a spolupráce
Průmysloví partneři
- Avast
- Bae Systems
- Bell
- Boeing
- Cadence
- Cisco
- Continental’s
- Česká televize
- DeepMind
- Foxconn
- Hewlett Packard Enterprise
- Honeywell
- IBM
- Newton Media
- Red Hat
- Siemens
- ŠKODA AUTO
- Toyota
- Trend Micro
Startupy založené výzkumníky AIC
- AgentFly Technologies
- Blindspot Solutions
- Cognitive Security (od 2013 pod Cisco)
- Resistant AI
- Umotional
Spolupráce s obranným průmyslem a agenturami
- Air Force Research Laboratory, AFOSR (USA), EOARD (UK)
- Office for Naval Research (USA)
- Rockwell Research Center (CZ)
- US Army, CERDEC/CECOM (USA/NJ)
Evropské a národní RTD projekty
- AgentLink III
- Centrum Aplikované Kybernetiky
- CONCEERN
- CONTRACT
- Decision Making and Control in Manufacturing
- Ecolead
- ExPlanTech
- ExtraPlanT
- K4CARE
- PANDA
Akademičtí partneři
- Carnegie Mellon University
- FAV ZČU
- FSV UK
- Imperial College London
- King’s College London
- Nanyan Technological University Singapore
- PřF UK
- Univeristy of Oxford
- Universität Innsbruck
- Université de Lille
- University of Texas El Paso
Vybrané publikace
- Moravčík, M.; Schmid, M.; Burch, N.; Lisý, V. et al. DeepStack: Expert-level artificial intelligence in heads-up no-limit poker. SCIENCE. 2017, 356(6337), 508-513. ISSN 0036-8075.
- Saska, M.; Báča, T.; Thomas, J; Chudoba, J.; Přeučil, L.; Krajnik, T; Faigl, J.; Loianno, G et al. System for deployment of groups of unmanned micro aerial vehicles in GPS-denied environments using onboard visual relative localization. Autonomous Robots. 2017, 41(4), 919-944. ISSN 0929-5593.
- Stiborek, J.; Pevný, T.; Rehák, M. Multiple instance learning for malware classification. Expert Systems with Applications. 2018, 2018(93), 346-357. ISSN 0957-4174.
- Krajník, T.; Fentanes, J.P.; Santos, J.M.; Duckett, T. Fremen: Frequency map enhancement for long-term mobile robot autonomy in changing environments. IEEE Transactions on Robotics. 2017, 33(4), 964-977. ISSN 1552-3098.
- Loianno, G.; Spurný, V.; Thomas, J.; Báča, T.; Thakur, D.; Heřt, D.; Pěnička, R.; Krajník, T. et al. Localization, Grasping, and Transportation of Magnetic Objects by a team of MAVs in Challenging Desert like Environments. IEEE Robotics and Automation Letters. 2018, 99(PP), 1-8. ISSN 2377-3766.
- Pěnička, R.; Faigl, J.; Váňa, P.; Saska, M. Dubins Orienteering Problem. IEEE Robotics and Automation Letters. 2017, 2(2), 1210-1217. ISSN 2377-3766.
- Kusumam, K; Krajník, T.; Pearson, S.; Duckett, Tom; Cielniak, Grzegorz. 3D-Vision Based Detection, Localisation and Sizing of Broccoli Heads in the Field. Journal of Field Robotics. 2017, 34(8), 1505-1518. ISSN 1556-4959.
- Kunze, L.; Hawes, N.; Ducket, T.; Hanheide, M.; Krajník, T. Artificial Intelligence for Long-Term Robot Autonomy: A Survey. IEEE Robotics and Automation Letters. 2018, 3(4), 4023-4030. ISSN 2377-3766.
- Fiedler, D.; Čertický, M.; Alonso-Mora, J.; Čáp, M. The Impact of Ridesharing in Mobility-on-Demand Systems: Simulation Case Study in Prague. In: 2018 21st International Conference on Intelligent Transportation Systems (ITSC). IEEE Intelligent Transportation Systems Society, 2018. p. 1173-1178. ISSN 2153-0017. ISBN 978-1-7281-0323-5.
- Torreno, A.; Onaindia, E.; Komenda, A.; Štolba, M. Cooperative Multi-Agent Planning: A Survey. ACM Computing Surveys. 2018, 50(6), ISSN 0360-0300.