Custom-made 5G networks for communication with robots
Robotics and 5G networks – do they go together? The researchers at the Artificial Intelligence Center at FEE CTU believe that they do. The use of 5G infrastructure in robotic tasks was tested at the Deggendorf Institute of Technology (THD) in Freyung by the team of prof. Jan Faigl from the Computational Robotics Laboratory. In the initial phase of this Bavarian-Czech project led by prof. Wolfgang Dorner, the goal was to verify that large data from robots could be streamed in real time. And it worked! The team was able to transfer raw images from cameras and point clouds from a 3D laser rangefinder from the six-legged "spider" SCARAB II and the four-legged "dog" SPOT to a computer via 5G networks. At the same time, both robots were remotely controlled with minimal latency.

The six-legged SCARAB II and the four-legged SPOT stay in the Computational Robotics Laboratory at FEE CTU. SCARAB, with the appearance of a spider and the movement of an ant, was created completely in our laboratory using 3D printing. The robodog SPOT from Boston Dynamics was altered with sensors and other equipment developed at the university.
What makes this project unique is that the researchers did not use 5G services from large providers - they have developed their own solutions. This infrastructure is built using standard network properties, private bandwidth and mostly the Open Air Interface software, which is available as open source. The results are very promising! Great scalability and most importantly, stability of the connection allow, for example, streaming videos in raw quality with minimal latency.
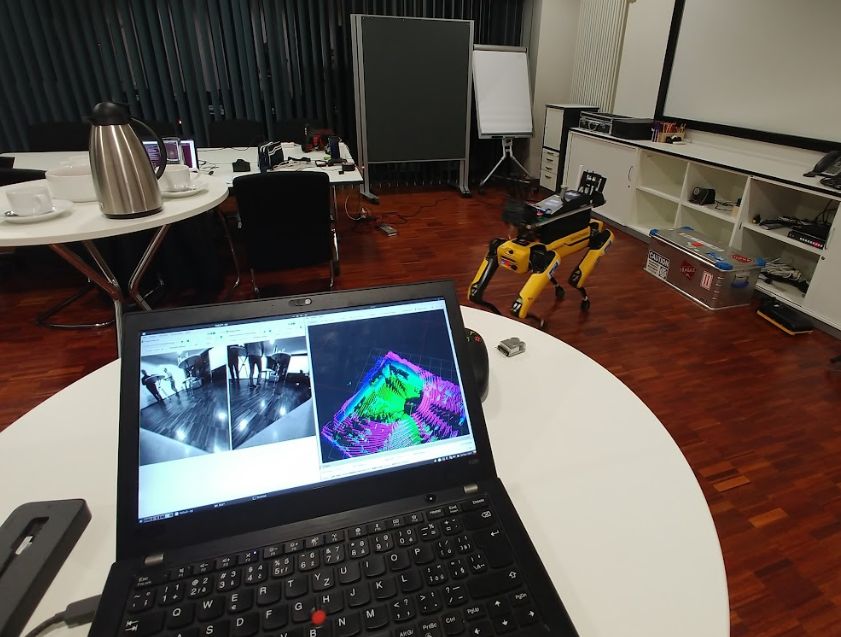
Data from the robot is transferred to the computer via the communication infrastructure of the 5G THD network. Data is not compressed during transmission and is immediately available for further processing and computations remotely.
Successful management testing and benchmarking is essential for the further development of the project. In the future, 5G network technology will allow us to collect data in autonomous robotic missions, where it is not possible or desirable to perform complex data operations directly on robots. In addition, remote data processing is more powerful and allows for greater flexibility.
The anticipated capabilities of 5G and 6G networks also promise to create a dynamic communication infrastructure where it is not available. With the use of our own 5G infrastructure, this opens up the possibility of deploying it in otherwise inaccessible places in terms of communication, such as underground areas or locations affected by natural disasters (earthquakes, tornadoes, floods, etc.).

The situation that requires the deployment of multi-robot systems is very well simulated in the DARPA SubTerranean Challenge, in which we have recently participated. Its goal is to use robots to locate hidden objects in an underground mining complex.
To get a better understanding of the application, imagine a situation where firefighters cannot get access to the victims of a collapsed building. Rapid renewal of a high-throughput communication infrastructure is a helpful tool in this emergency. Robots can map the terrain, send large data to operators, and report on the location of injured individuals, to which rescuers can be sent in a targeted and effective manner. Now you see how custom-made 5G mobile networks can play a vital role in rescue missions. Our project is the pioneer in this mission.

Jan Faigl (FEE CTU) and Siegfried Rödel (Technical University Deggendorf)
Source: Artificial Intelligence Center FEE CTU