"The 3D Mapping Challenge/UAS 5.0 is one of a series of First Responder UAS Challenges hosted by the United States National Institute of Standards and Technology (NIST). These competitions support the development of technology for U.S. search and rescue operations. It is a great opportunity for us to apply our experience in the development of prototype aerial robots for rescue operations and test them in tough competition," explained Assoc. Martin Saska, head of the Multirobotic Systems Group at the CTU Faculty of Electrical Engineering.
In Kansas, the competing teams will showcase their drone prototypes live for the first time; in the previous two rounds, the jury only evaluated videos of the competing autonomous drones solving a given task. A group of developers working at the Department of Cybernetics of FEE CTU is collaborating with the University of Virginia in the 3D Mapping Challenge/UAS 5.0. According to the rules of the competition, competing teams must have at least one member from the United States, and the Prague team was able to build on its previous collaboration with the American university. "According to the available information, we are the only research team from outside the USA that made it to the finals," said Assoc. Martin Saska. His team has also already received $15,000 for reaching the finals. But in Kansas, there will be much more to fight for than the big prize money: the winners will get the opportunity to join an accelerator programme to further research and put prototypes into production.
What the ideal drone for rescuers should look like
Firefighters need to collect visual and locational data about a structurally compromised building and the occupants without having to enter the building when investigating accidents and preparing for rescue operations. In this situation, it is essential to have real-time data (more than just a live video feed) to gain situational awareness and plan the deployment of critical resources to achieve mission objectives.
Incident commanders operating in this scenario must prioritize critical resources and make decisions for a timely response. In addition to accurately locating occupants, a real-time 3D map could help identify obstacles and other hazardous situations around occupants that would be important for planning entry and exit routes. Hazards to be identified include smoke, toxic gases, heat, and partially collapsed structures. All of these difficulties pose problems not only for humans, but also for the robotic solution being developed, which is additionally faced with limited or no lighting and non-functional location infrastructure such as GPS.
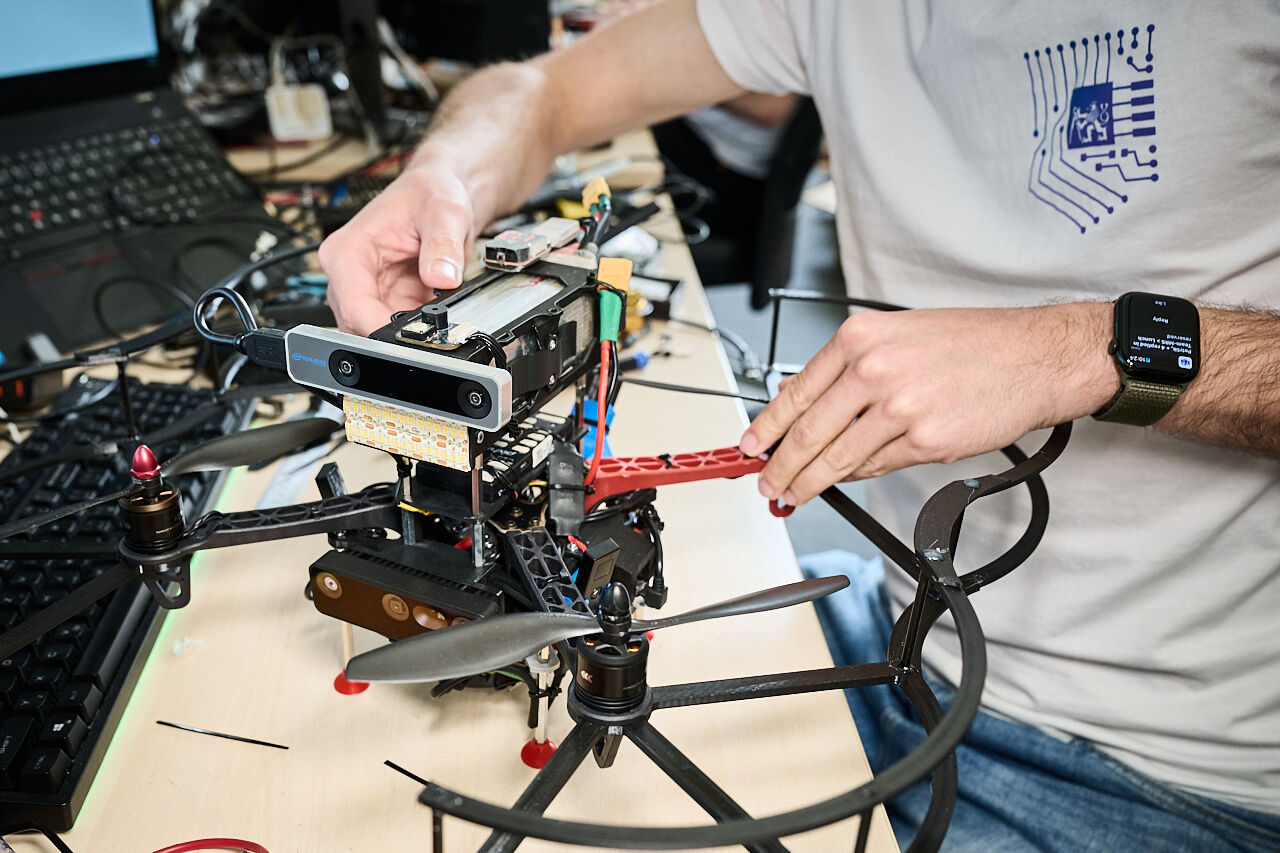
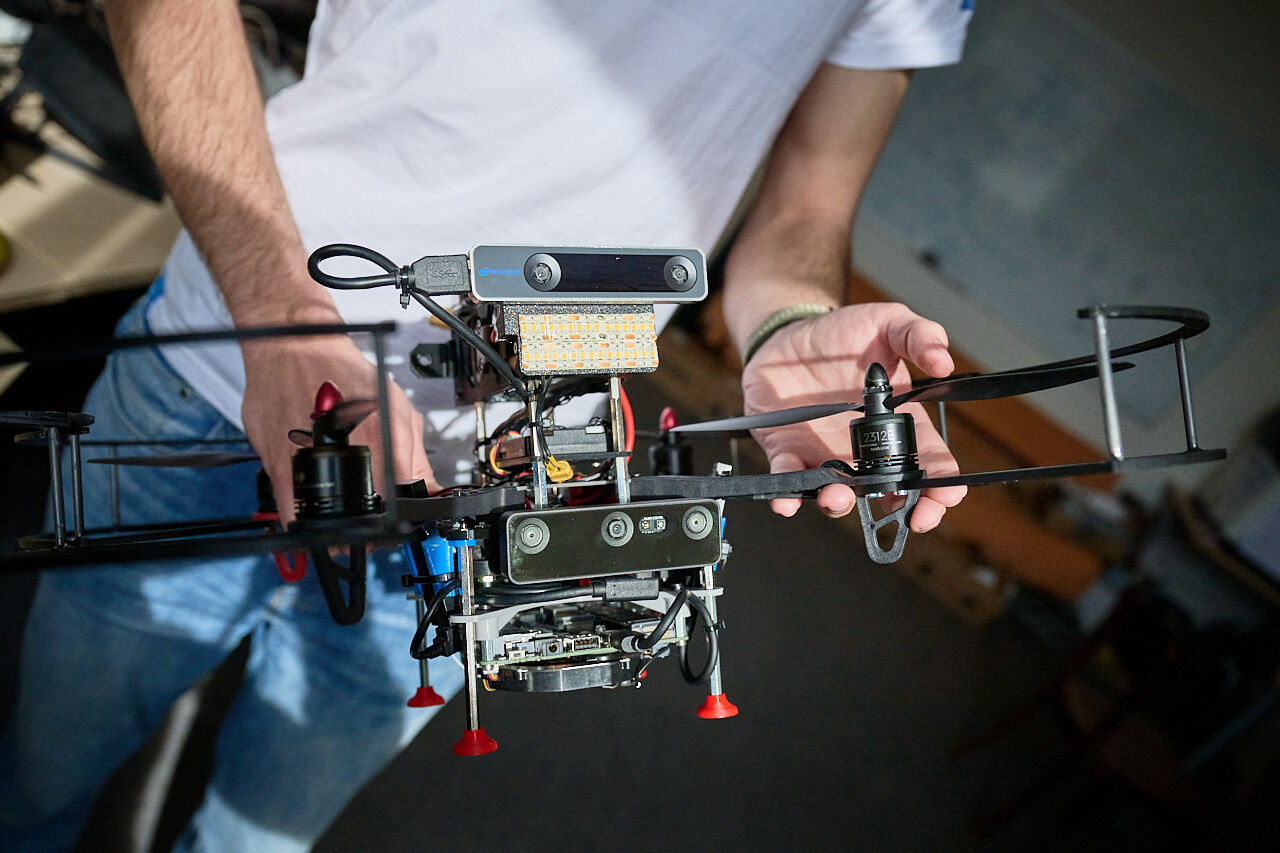
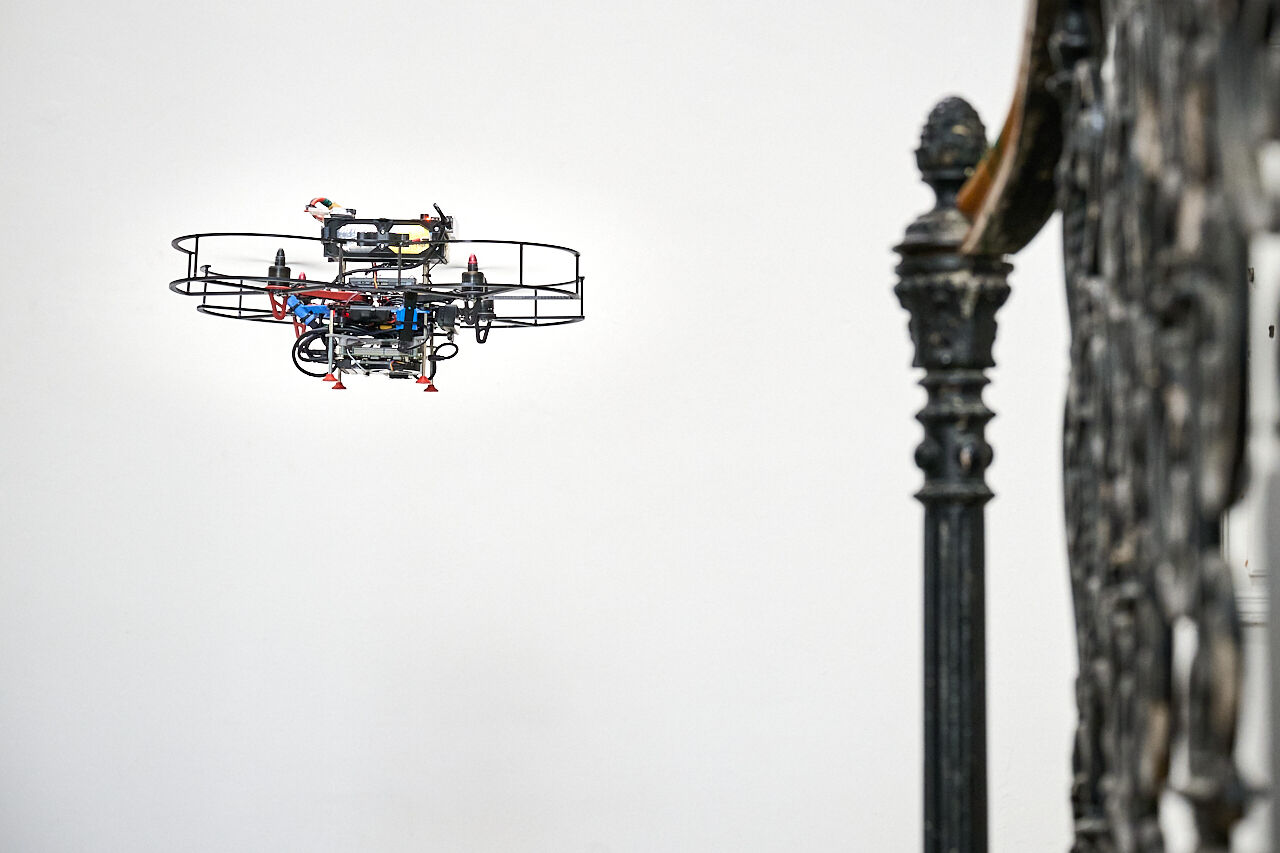
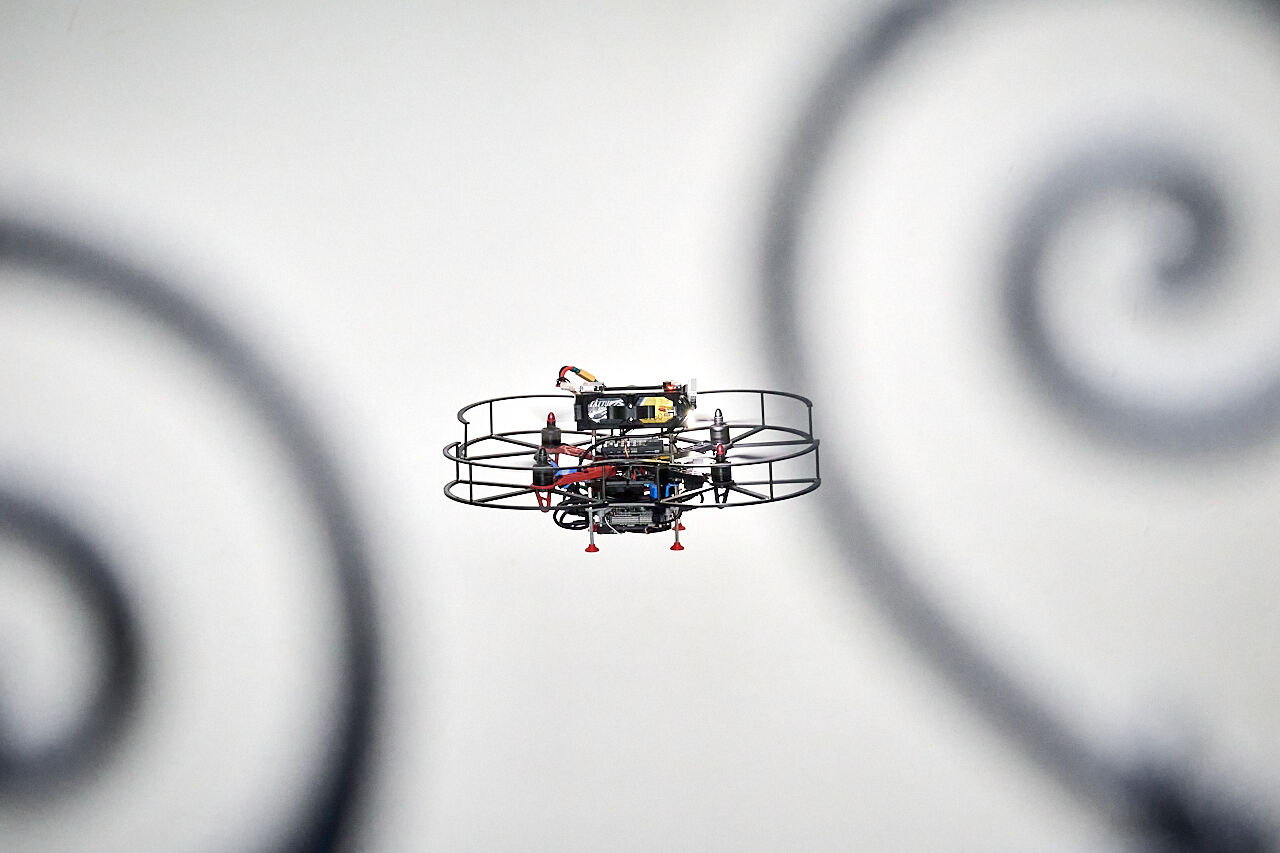
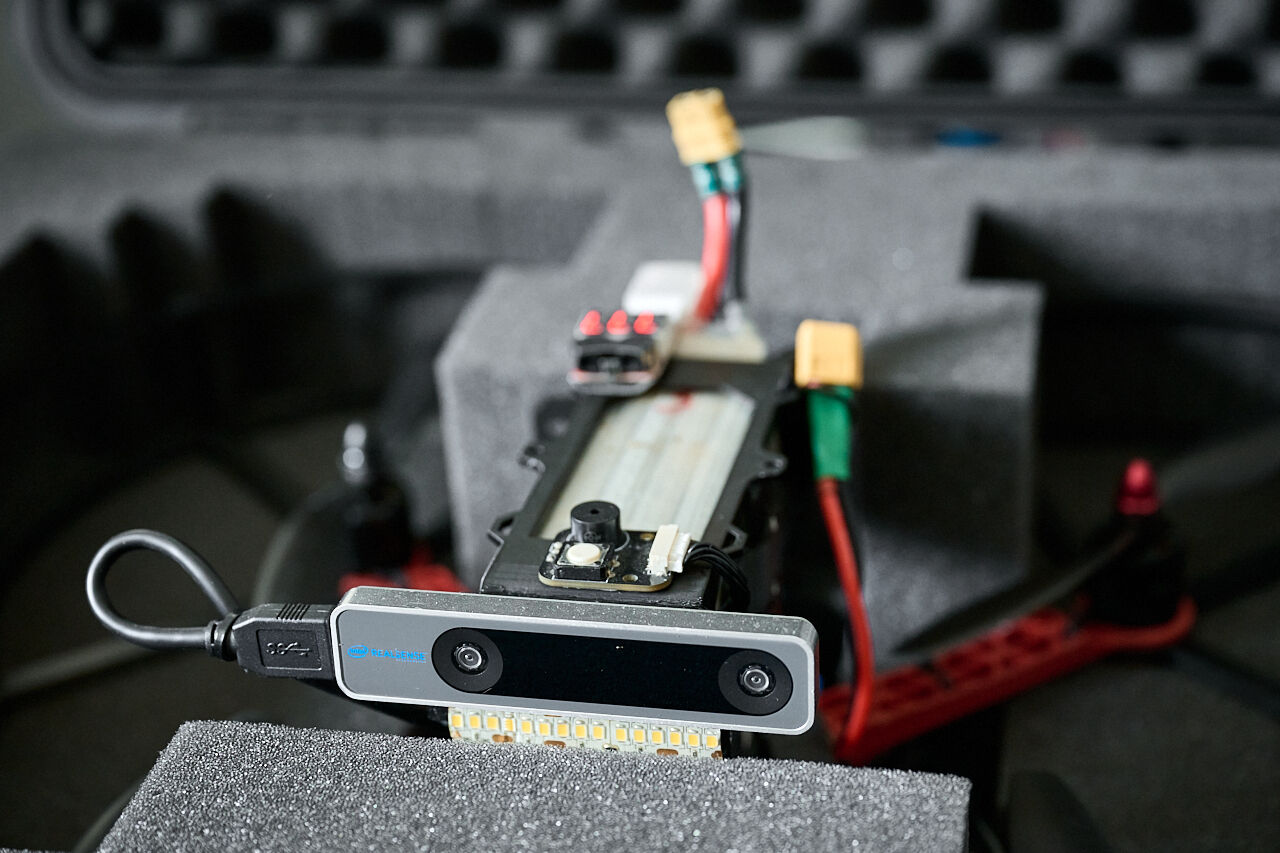
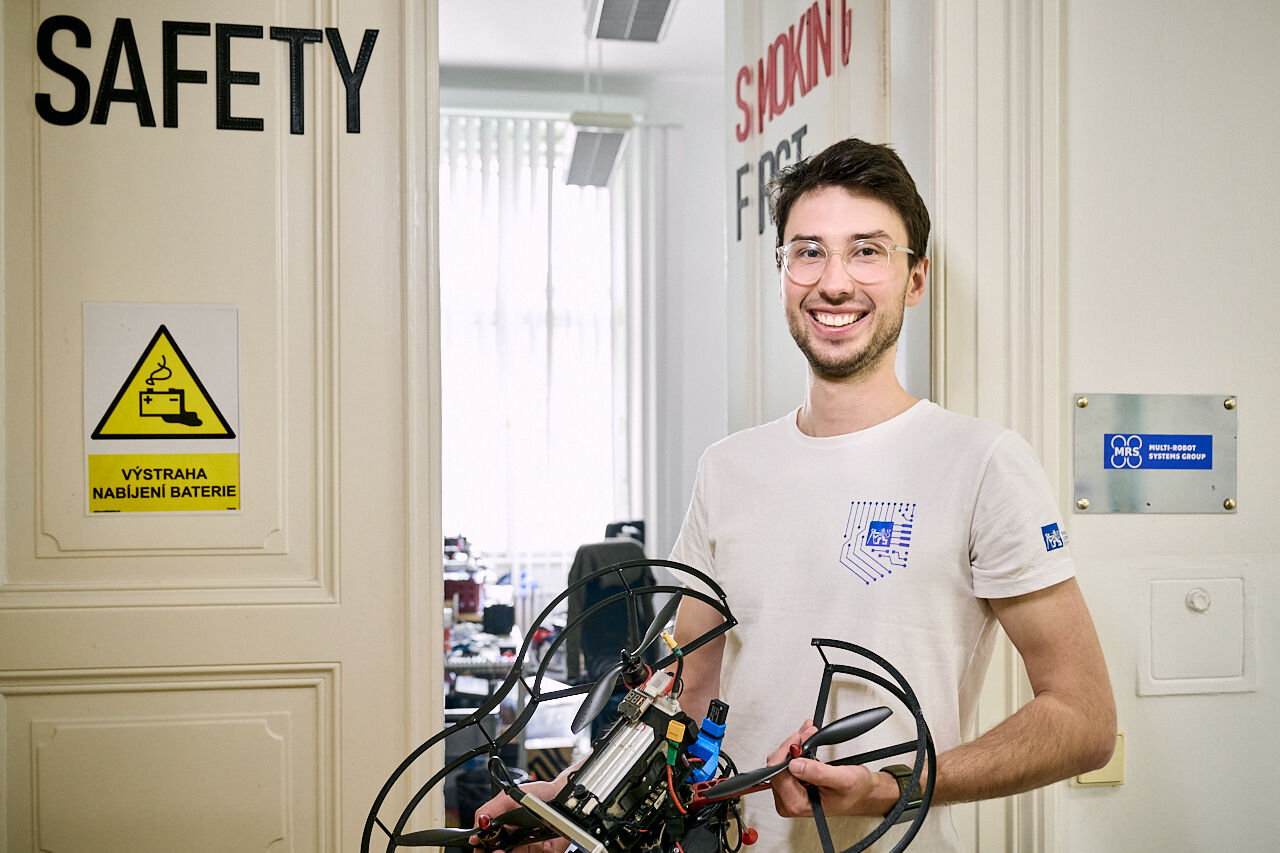
The developers from the Faculty of Electrical Engineering based their prototype on these specifications. In the corridor of the FEE CTU building on Charles Square, a mock-up of a 10 square metre space was created, in which the drone has so far competed remotely. "The goal is to provide rescuers with a whole map of the environment so that they can see everything that is in that environment. In the 3D Mapping Challenge, for the first time, we will use cameras instead of lidar to completely orient the drone in the environment. We chose to use cameras for two reasons. We wanted to minimize the size and weight of the drone so it could fly through tight spaces. Cameras are also orders of magnitude cheaper compared to lidars, which plays into the requirements for an affordable solution," explains PhD student Ing. Matěj Petrlík from the Multirobotic Systems Group.
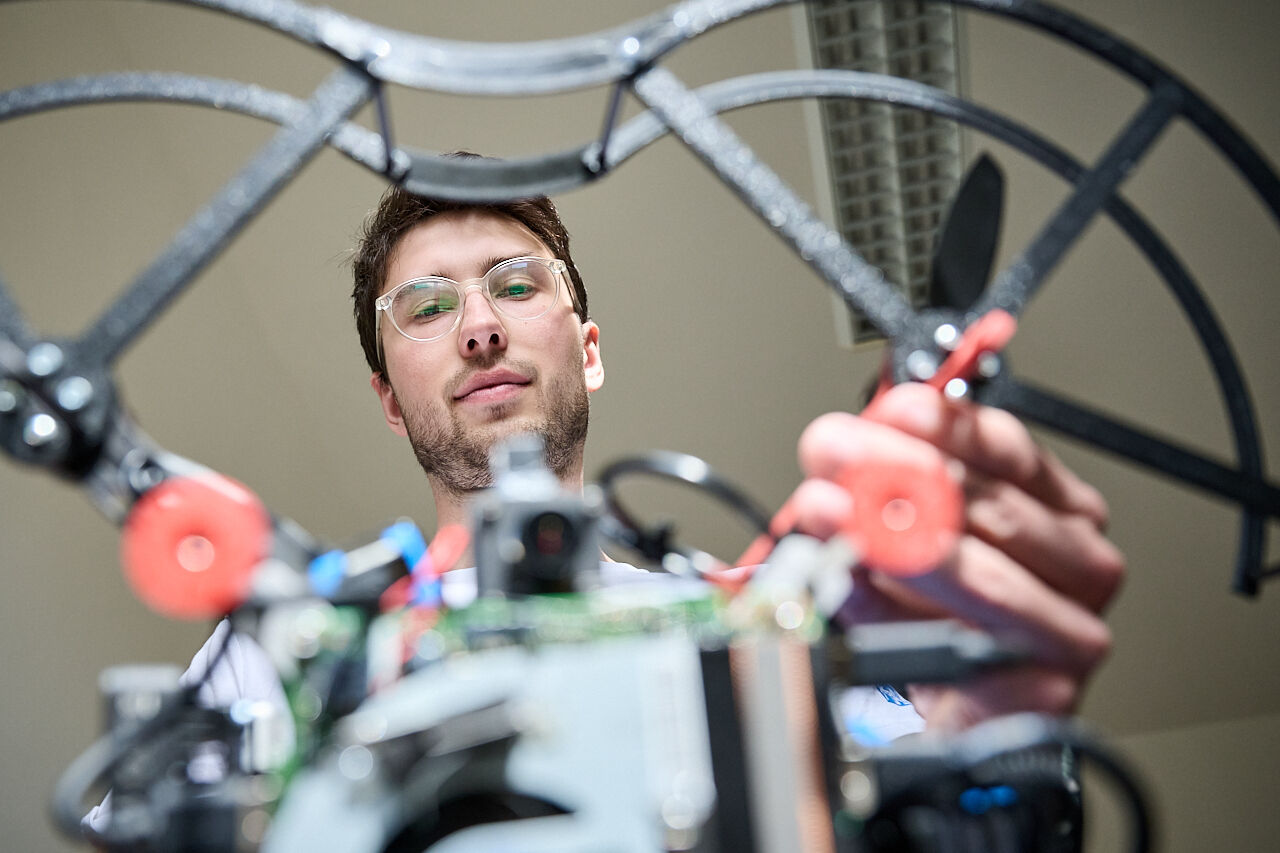
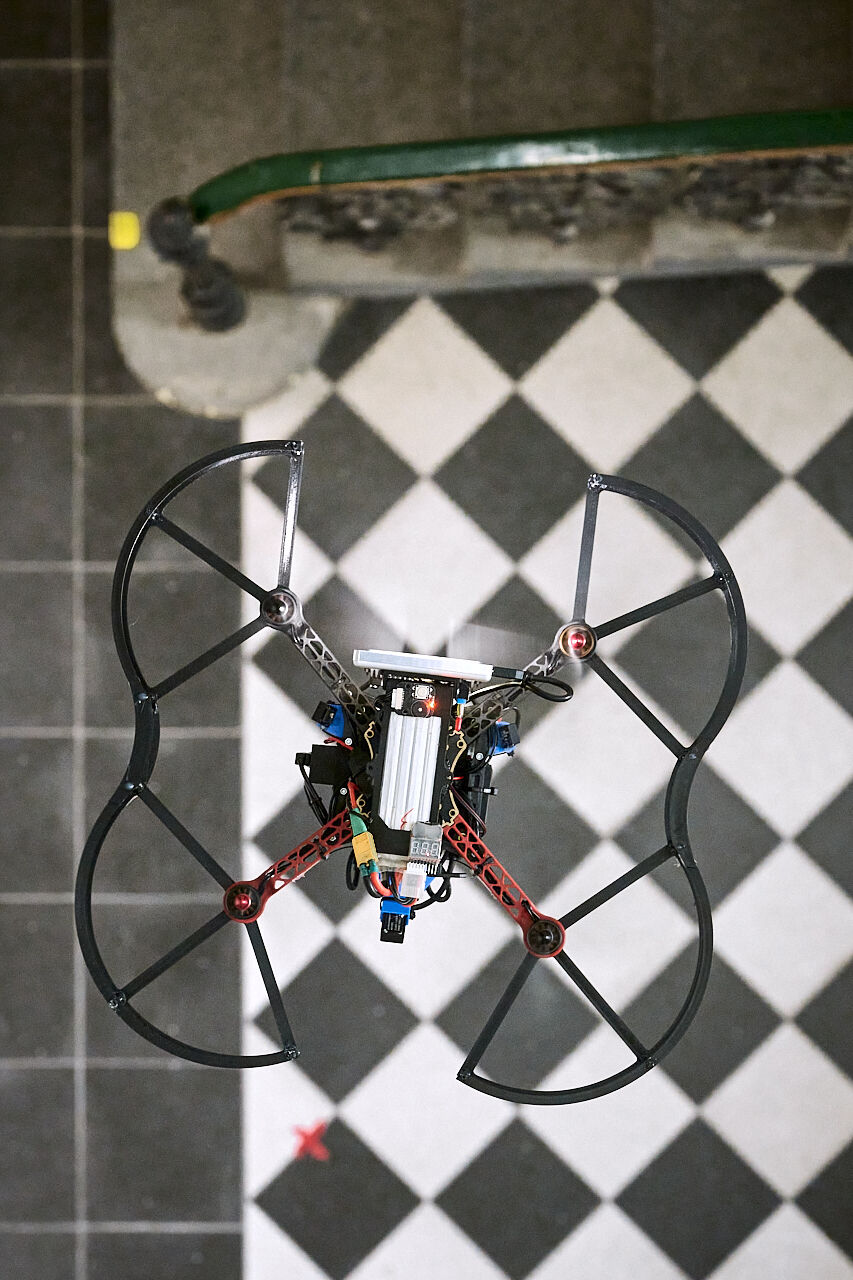
Another element of the prototype from FEE CTU, which will be equipped with a propeller guard to increase safety, also meets the needs of rescuers. "If the drone were to crash into something, its propeller would not be damaged, and at the same time people will be protected from injury," adds Matěj Petrlík.
Developers from MRS FEE CTU in Prague can offer one of the most advanced software for fully autonomous flying. Their drones do not require rescuers to control them, who can simply instruct the drones on a map where to go and what to do there. Matěj Petrlík sums up his experience from previous competitions that it is the software that decides the winning position.
Photo: Petr Neugebauer, FEE CTU.
Links to MRS videos - mapping an unknown environment and accurately locating an object in it: