Projekt je řešen v rámci projektu TAČR s číslem TA02011092. Zaměřuje se na výzkum a vývoj systému radaru, jehož základní funkce je založena na principu SAR (Synthetic Aperture Radar) doplněném o navigační jednotku (NAV), která tak se SAR tvoří ucelený systém aplikovatelný na palubách helikoptér či letadel. Základní funkcí projektu je integrace SAR a NAV, čímž vznikne unikátní systém plnící funkci kontinuální navigace (aktuální pozice, rychlost a orientace v prostoru) při současném získání obrazu terénu a scény za nepříznivých podmínek, kde stávající monitorovací a mapovací systémy již nefungují (mraky, mlha, kouř, atd.). To jde s výhodou využít např. pro monitorování urbanistických změn krajiny, či pro zajištění bezpečného přistání helikoptéry za nulové viditelnosti. NAV vychází z použití inerciální měřicí jednotky, viz obr. 2, obr. 3, ke které jsou připojitelné externí přijímač GPS a magnetometr. Jelikož získaný obraz ze SAR, příklad na obr. 4, může být použit pro zpřesnění navigační úlohy, je plánována rovněž integrace SAR a INS pomocí adaptivních algoritmů Kalmanovy filtrace. Unikátnost tohoto řešení bude v tom, že daný systém bude měřit a vyhodnocovat všechna data na palubě letadla či helikoptéry a poskytovat pilotovi důležité informace jak o místě přistání, tak i pro samotnou pilotáž.
Výzkum a vývoj technologií pro radiolokační mapovací a navigační systémy
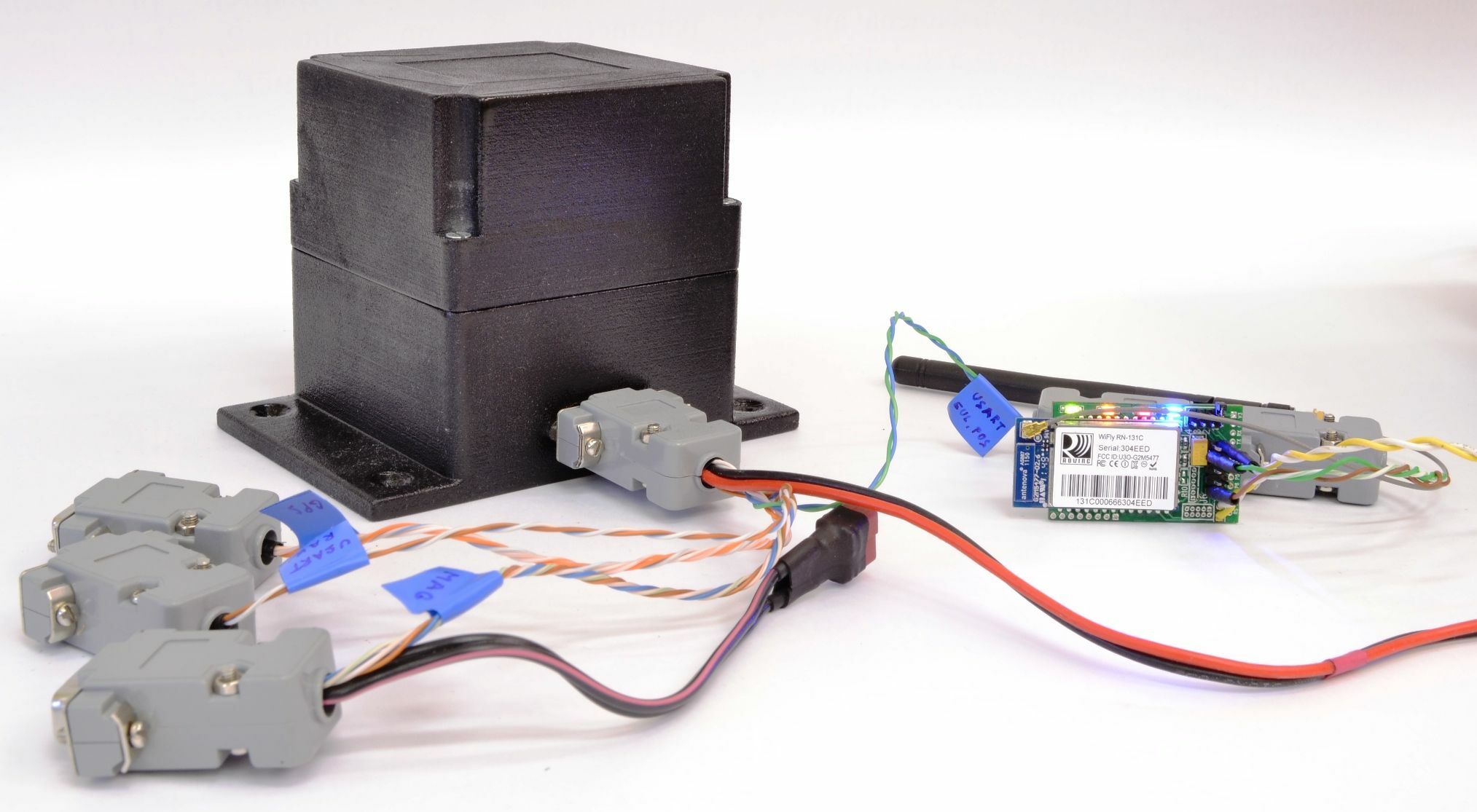

Obr. 2 - Navigační systém umožňující připojení externího magnetometru a GPS přijímače s wi-fi modulem (vlevo), systém umělého horizontu zobrazený na tabletu s operačním systémem Android (vpravo)

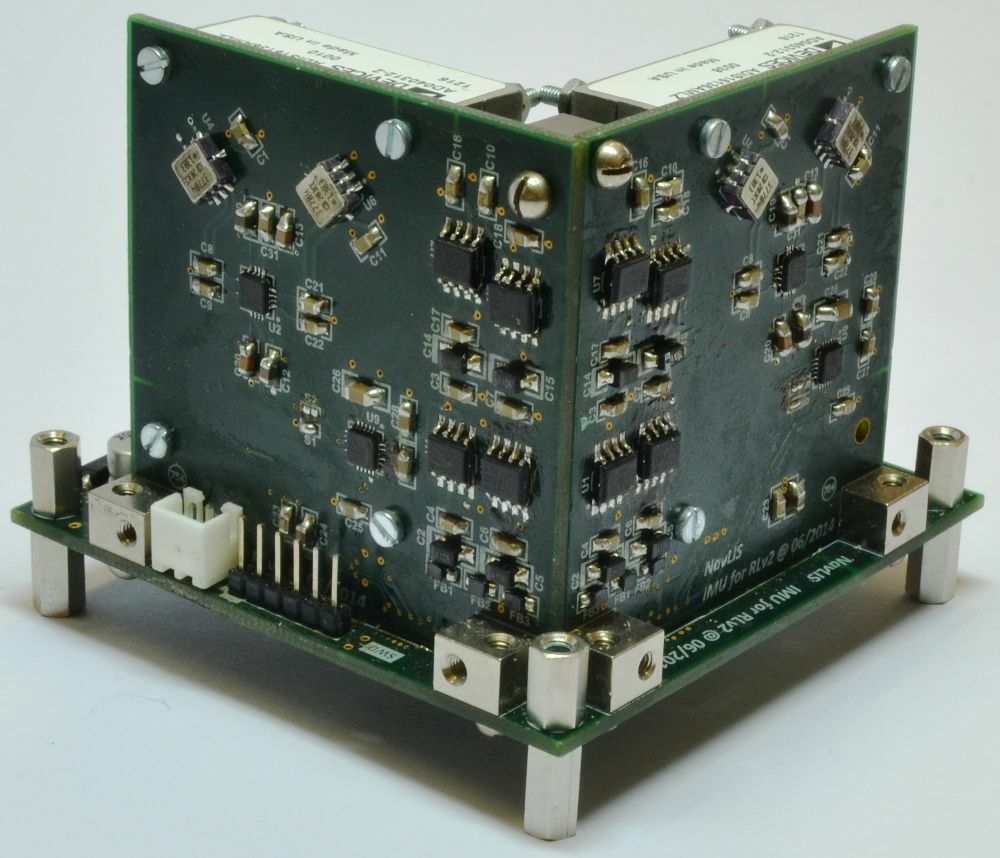
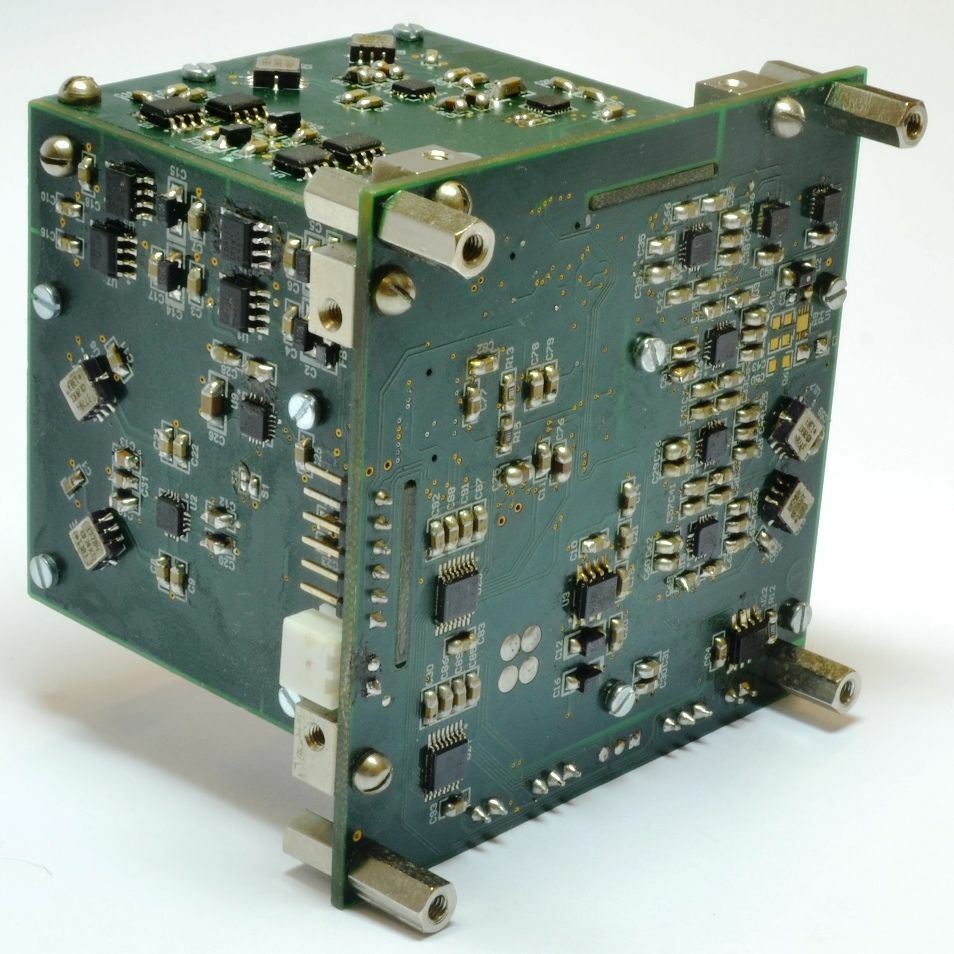
Obr. 3 - Multi-senzorová inerciální měřicí jednotka s modifikovanou strukturou akcelerometrů


Obr. 4 - Reálná scéna (vlevo) nasnímaná SAR radarem (vpravo)
Výzkumné skupiny

NavLIS - Navigační skupina laboratoře Leteckých Informačních Systémů
Výzkumné téma
Navigační systémySkupina se zaměřuje na výzkum a vývoj navigačních systémů a jejich algoritmů použitelných v širokém spektru aplikací, např. pro navigaci leteckých a pozemních prostředků, robotů, UAV, inteligentních detektorů kovů, hand-held zařízení, a to pomocí fúze dat z dostupných systémů (inerciálních senzorů, GNSS, inklinometrů, magnetometrů, kamer aj.). Snaží se zajistit dostatečnou přesnost určení orientace a pozice i při silných vibracích, rozdílné dynamice pohybu a vlivu okolí.
