Polynomiální metody a řídicí systémy obecně uvažují typicky se systémy se soustředěnými parametry popsanými například přenosem. Popsat pomocí polynomů a polynomiálních matic s více proměnnými takové soustavy, jejichž vlastnosti se vyvíjí nejen v čase, ale závisejí i na jedné nebo více prostorových souřadnicích, a navrhnout pro takové systémy smysluplné řízení pomocí polynmomiálních operací je cílem tohoto výzkumu.
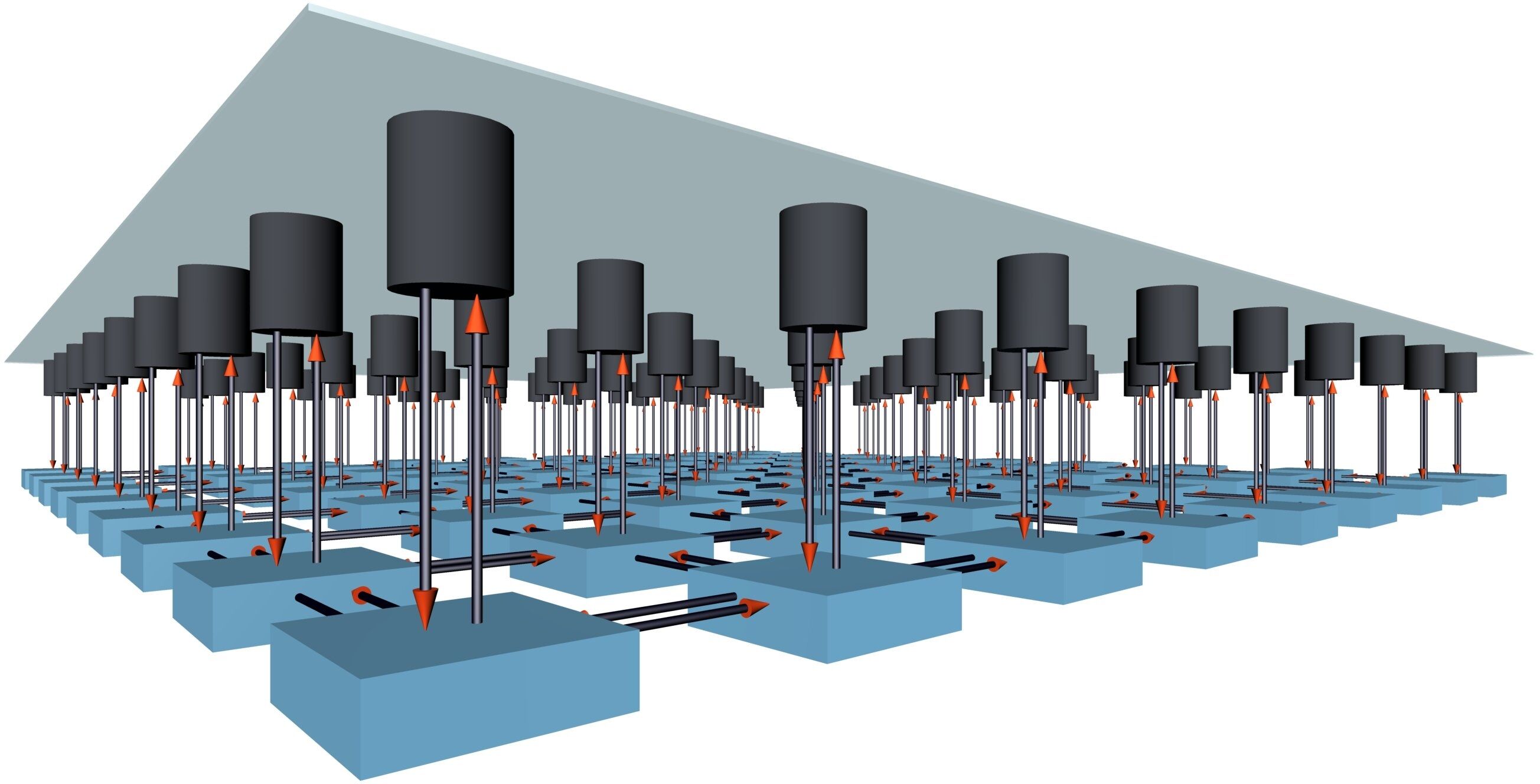
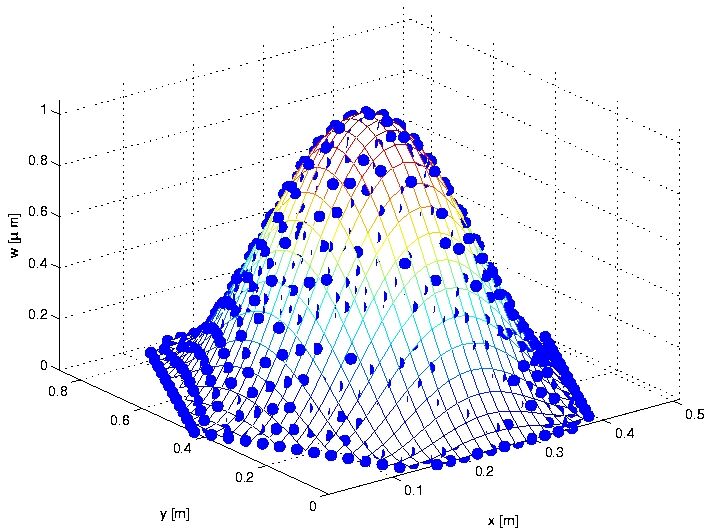
Motivací výzkumu je adaptivní optika - moderní disciplína, jejímž cílem je měnit optické vlastnosti systému na základě detekovaných změn v samotném systému nebo ve vnějším prostredí. Uvažováno je deformovatelné zrcadlo nebo plech se sadou akčních členů a senzorů umístěných pod povrchem. Odvozena je přenosová funkce ze vstupní síly na výchylku plechu, tj. podíl dvou polynomů o třech promenných -- dvě proměnné odpovídají prostoru, jedna času. Rozšírením algebraické teorie řízení o metody pro vícerozměrné oboustranné polynomy bude možné navrhnout optimální regulátor řízení výchylky deformovatelného zrcadla či plechu. Vedle astronomie bude možno tyto metody využít pro řízení laserového paprsku, v očním lékařství aj. Kontakt: Petr Augusta