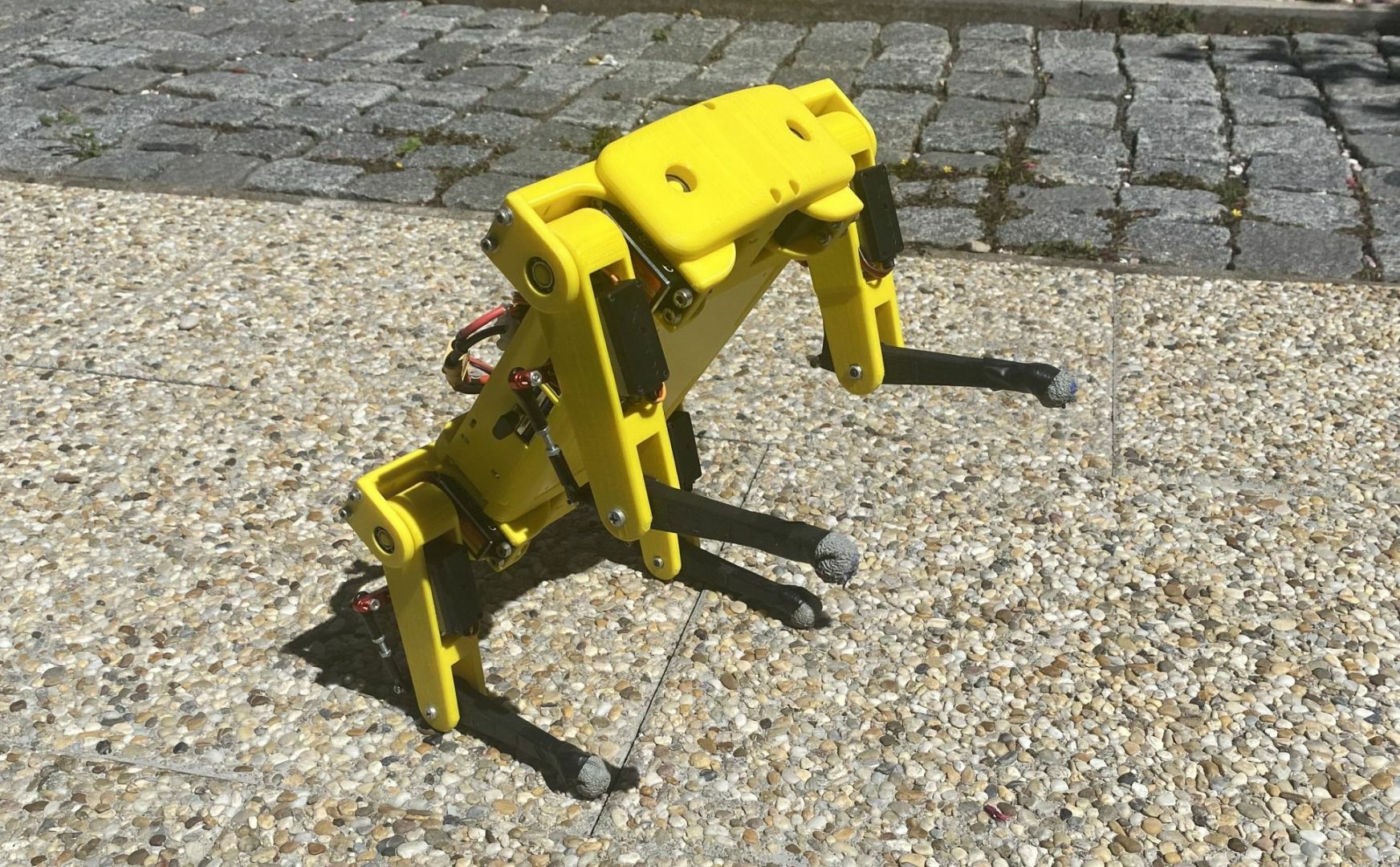
Čím si ale získal pozornost odborného světa, nebyl pouze samotný robot. Odborníky zaujala hlavně pokročilá počítačová simulace pohybových vzorců malého žlutého neposedy.
NOTSPOT vznikl v rámci maturitní práce. Samozřejmě úspěšné maturitní práce. A další úspěchy slavil robot a jeho simulace i v rámci Středoškolské odborné činnosti (SOČ). Jakub a jeho NOTSPOT se umístili na první příčce v kategorii strojírenství. To mělo za následek i skutečnost, že po přihlášce na FEL ČVUT byl Jakub rovnou přijat – bez přijímacích zkoušek. „Měl jsem sice i dobrý průměr z matematiky, takže bych se dostal bez přijímaček i tak, ale jestli můžu někomu radit, tak doporučuji SOČ. Biflovat se na přijímačky a pak je doopravdy udělat je určitě super, ale ze SOČky můžete mít nějaký svůj skvělý projekt, ukázat světu, že jste se něco naučili, něco dokázali. Mně se navíc v souvislosti s NOTSPOTEM začaly hlásit kontakty z celého světa, takže jsem určitě moc rád, že jsem do toho šel,“ vysvětluje Jakub Jon, student prvního ročníku oboru kybernetika a robotika na Fakultě elektrotechnické.
Jakubova maturitní práce byla poměrně obsáhlá – a značně multioborová. Robota si sám navrhnul, zkonstruoval, poskládal elektronické součástky, navrhl software umožňující komunikaci jednotlivých prvků. „Asi 80 procent součástek jsem si vytisknul podle vlastního návrhu na 3D tiskárně. Jako hotové součástky jsem v podstatě kupoval jen motory a šroubky,“ doplňuje mladý robotik Jakub.
Ačkoli výsledné pohyby vypadají hodně podobně, jeho robot má jednodušší řízení pomocí pozic kloubů. Jeho velký předobraz SPOT je řízen prostřednictvím kroutících momentů. Co ale bylo na celé práci nejtěžší, byl určitě software. „Když jsem začínal, neměl jsem žádné zkušenosti. Hledal jsem nějaké možnosti, jak ovládat motory robota. Potom jsem narazil na Robotic Operating System, ROS, tak jsem se ho naučil,“ říká s lehkostí svého mládí Jakub. U počítače na tvorbě simulátoru vydržel sedět zhruba dva měsíce. Práce na robotovi a práce v simulátoru probíhaly paralelně. V softwaru Jakub nejprve ověřil, zda a jak bude robot fungovat, a získané znalosti principů potom přenášel na reálného robopsa – už jen s úpravou některých parametrů a za využití optimalizace.
„ROS je vlastně taková mezivrstva mezi skutečným operačním systémem, což je v tomto případě Linux, a samotným robotem. ROS zprostředkovává komunikaci mezi jednotlivými prvky robotického systému. Stejný typ příkazu se pak dá využít pro nejrůznější druhy robotů,“ doplňuje dr. Martin Pecka z FEL ČVUT. S ním teď Jakub úzce spolupracuje a pro skupinu Vidění pro roboty a autonomní systémy (VRAS) vytváří simulátor SPOTa. Jeho výrobce Boston Dynamics totiž neumožňuje přístup k ovládacímu softwaru a simulace pohybu v nejrůznějších prostředích ušetří výzkumníkům spousty času a energie. Jakub Jon se k této semestrální práci přihlásil u dr. Pecky z vlastní iniciativy.
„Pro mne osobně to byl první student, který se na vypsané téma ozval sám od sebe,“ pochvaluje si Martin Pecka. „Výsledky Jakubovy práce nám pomáhají navrhovat nové algoritmy například pro mapování neznámého terénu nebo nastavení koordinace skupiny několika robotů,“ dodává. Spoustu věcí, na nichž vědci bádají, lze podle něj ověřit snadněji a lépe v simulátoru, na němž Jakub pracuje. A student má lepší výsledky, než se čekalo. „Je to pro mne učení se nových věcí. Doposud jsem téměř nepoužíval optimalizaci, teď je optimalizace skoro všude,“ pochvaluje si Jakub Jon.
Výzkumná skupina by se v budoucnu chtěla zaměřit na záchranářskou robotiku, s níž původně začínala. Spolupracovala se záchranáři i hasiči. Zkoumaly se možnosti, jak mohou být roboti užiteční a jak nastavit komunikaci mezi nimi a člověkem. V současnosti vědci spolupracují s firmou obsluhující plynová potrubí. Cílem je provádět inspekci venkovního vedení, kdy trubka je zakopaná v zemi a autonomně se pohybující robot čidly prověřuje, zda nedochází k úniku. „Rádi bychom s chodícími roboty vylezli takříkajíc z podzemí na povrch,“ uzavírá s nadšením dr. Pecka.
Odkaz na přednášku/Installfest: https://www.youtube.com/watch?v=dLuEh4J_4pI. Jakub s NOTSPOTem vystupují od času 45:00.