Na tomto projektu se sice již pracovalo v roce 2010-2012 v rámci interního grantu ČVUT SGS10/288/OHK3/3T/13, ale jedná se stále o aktuální téma, které je nutné rozvíjet a případně i vylepšovat. Práce tudíž pokračují. V rámci dovršeného projektu byly navrženy nové postupy pro komplexní zpracování senzorových signálů a dat a nová struktura heterogenního multisenzorového systému, viz obr. 1, které vedly k zásadnímu zvýšení přesnosti určení pozice a orientace s využitím běžných cenově přijatelných senzorů. Pro experimentální ověření vyvinutých algoritmů a hardwarových konceptů byl vyvinut integrovaný systém s modulární strukturou využívající senzorových bloků a dalších měřicích subsystémů. Systém integruje pro dosažení požadované přesnosti údaje pomocí adaptivní fúze dat v podobě Kalmanovy filtrace. Modulární struktura s centrálním řízením umožňuje propojení následujících subsystémů: IMU (inerciální měřicí jednotka) jako primárního systému, dále systému GPS přijímače, ADC (Air Data Computer - aerometrický měřicí systém), elektrolytických libel, magnetometru a ultrazvukových senzorů. Celý modulární systém v plné konfiguraci byl ověřen na bezpilotním prostředku Bellanca Super Dectahlon XXL od firmy Hacker Model Production s.r.o., viz obr. 1.
Modulární systém pro určování pozice a orientace v prostoru

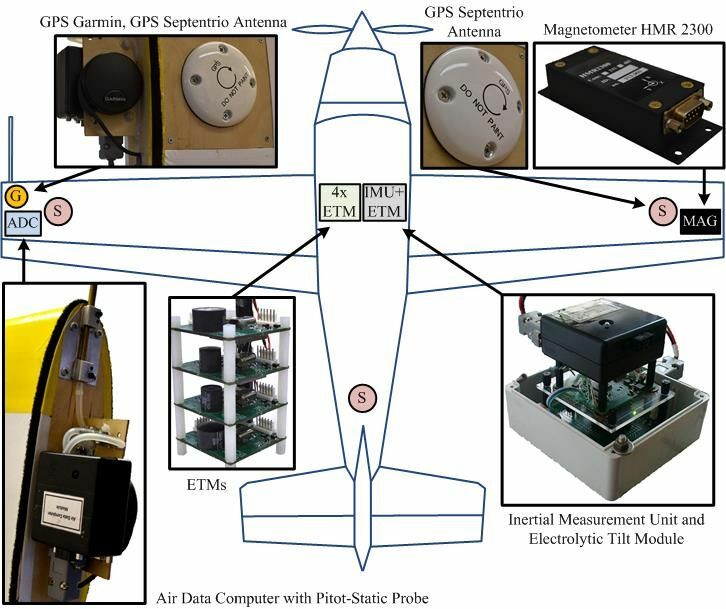
Obr. 1 - Bezpilotní prostředek (vlevo), modulární systém pro přesné měření pozice a orientace (uprostřed), uspořádání senzorů na bezpilotním prostředku (vpravo)
Výzkumné skupiny

NavLIS - Navigační skupina laboratoře Leteckých Informačních Systémů
Výzkumné téma
Navigační systémySkupina se zaměřuje na výzkum a vývoj navigačních systémů a jejich algoritmů použitelných v širokém spektru aplikací, např. pro navigaci leteckých a pozemních prostředků, robotů, UAV, inteligentních detektorů kovů, hand-held zařízení, a to pomocí fúze dat z dostupných systémů (inerciálních senzorů, GNSS, inklinometrů, magnetometrů, kamer aj.). Snaží se zajistit dostatečnou přesnost určení orientace a pozice i při silných vibracích, rozdílné dynamice pohybu a vlivu okolí.
