Jedná se o dvouletý interní projekt ČVUT s číslem SGS13/144/OHK3/2T/13, který se orientuje na dva cíle. Prvním cílem je vývoj plnohodnotného INS primárně využívajícího jen přesné inerciální senzory, tj. vláknových laserových gyroskopů DSP-3100 (výrobce KVH) a přesných quartz akcelerometrů INN-204 (výrobce Innalabs), viz obr. 6. Vývojem plnohodnotného INS se rozumí výzkum a vývoj algoritmů pro výpočet polohových úhlů a pozice bez použití dalších pomocných měřicích systémů. Pro dosažení přesností srovnatelných se stávajícími průmyslovými řešeními INS systémů, tj. nepřesnost v pozici do 1 NM/hod., je nutné implementovat kompletní mechanizaci výpočtů navigační rovnice bez jakýchkoliv zjednodušení. Druhým cílem je vývoj miniaturizované navigační jednotky využívající MEMS senzorů a miniaturních měřicích systémů s širokým potenciálem aplikovatelnosti. Takovýto systém se bude vyznačovat unikátní koncepcí integrace moderních senzorů a systémů s metodami zpracování dat obsahujícími algoritmy pro zpřesnění výpočtů polohových úhlů a pozice. Aplikovatelnost obou typů plánovaných navigačních jednotek bude široká a to od malých či středních letadel, přes navigaci detektoru kovů, navigaci mobilních prostředků v podobě UAV či pozemních robotických prostředků až po hand-held zařízení pro osobní navigaci při pohybu ve městech i mimo něj.
Moderní metody ve vývoji inerciálních navigačních systémů
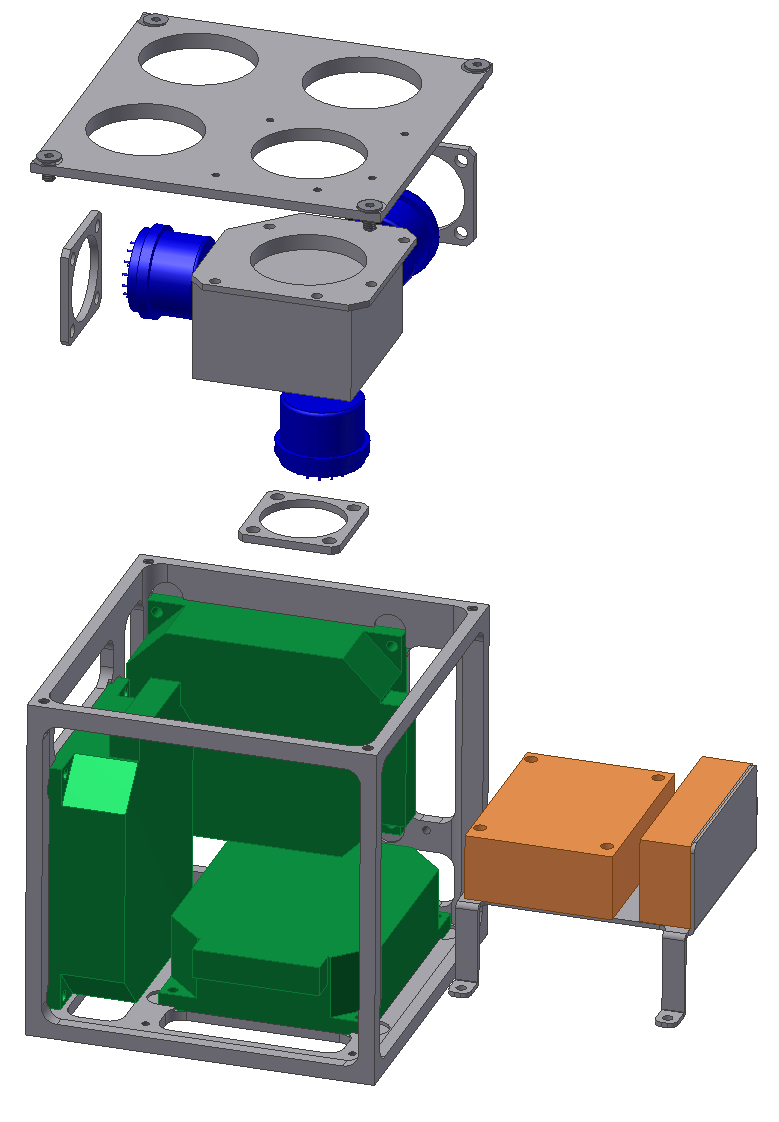

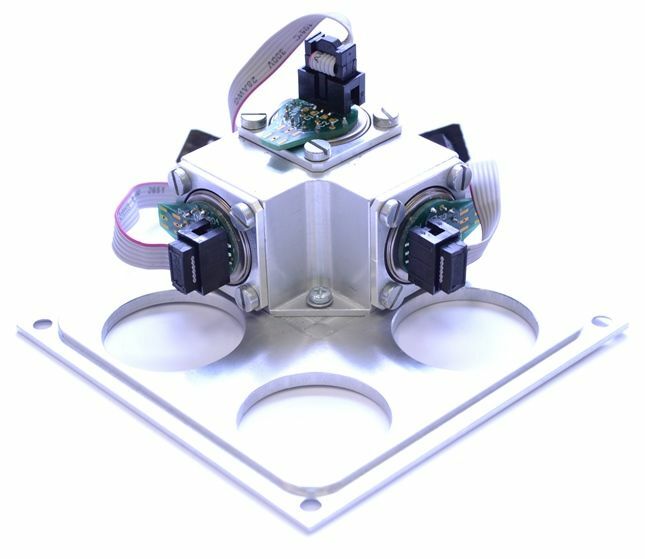


Obr. 6 - Realizace "Tactical grade" inerciálního navigačního systému (zleva): koncepční uspořádání, quartz akcelerometr INN-204, rám s uchycením akcelerometrů, uchycení gyroskopů DSP-3100, realizace "Tactical grade" inerciálního systému.
Výzkumné skupiny

NavLIS - Navigační skupina laboratoře Leteckých Informačních Systémů
Výzkumné téma
Navigační systémySkupina se zaměřuje na výzkum a vývoj navigačních systémů a jejich algoritmů použitelných v širokém spektru aplikací, např. pro navigaci leteckých a pozemních prostředků, robotů, UAV, inteligentních detektorů kovů, hand-held zařízení, a to pomocí fúze dat z dostupných systémů (inerciálních senzorů, GNSS, inklinometrů, magnetometrů, kamer aj.). Snaží se zajistit dostatečnou přesnost určení orientace a pozice i při silných vibracích, rozdílné dynamice pohybu a vlivu okolí.
