Vývoj kalibrační All-In-One platformy a algoritmů pro kalibraci tříosých akcelerometrů, magnetometrů a senzorů úhlových rychlostí pomocí levné nemagnetické kalibrační platformy s využitím referenčního systému s vláknovým gyroskopem pro přesné odměřování úhlové rychlosti a tím i úhlu podél vertikální osy. Hlavním úkolem tohoto snažení je vývoj časově nenáročných a cenově příznivých metod pro kalibraci daných senzorů a systémů. Naše pracoviště dále provádí kalibrace náklonoměrů, teplotní kalibrace senzorů a testování na vliv vibrací. All-In-One platforma je schematicky zobrazena na obr. 7, která vychází z dříve používaného náklonného stolku, též na obr. 7. Kalibrační platforma pro přesná měření úhlů náklonu používá přesný náklonoměr HCA528T s analogovým výstupem, pro který bylo nutné navrhnout obvody pro zpracování, viz obr. 8.
Kalibrace a testování inerciálních senzorů a měřicích systémů
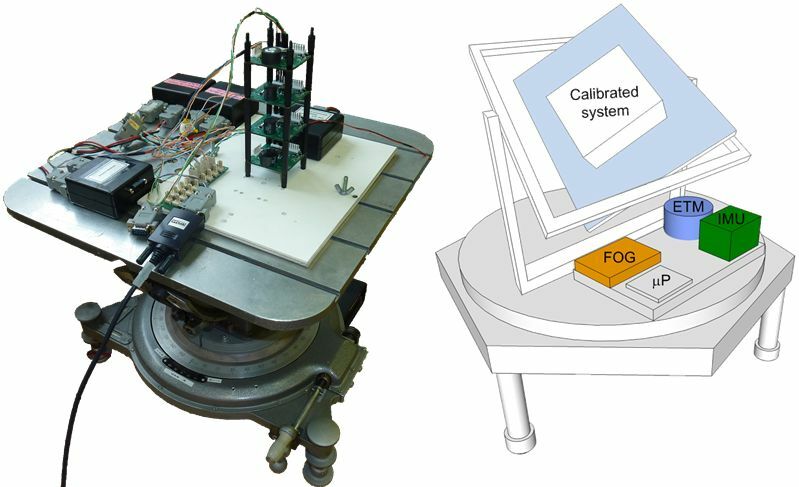
Obr. 7 - Systémy pro kalibraci měřicích systémů, náklonný stolek (vlevo), All-In-One kalibrační platforma (vpravo)

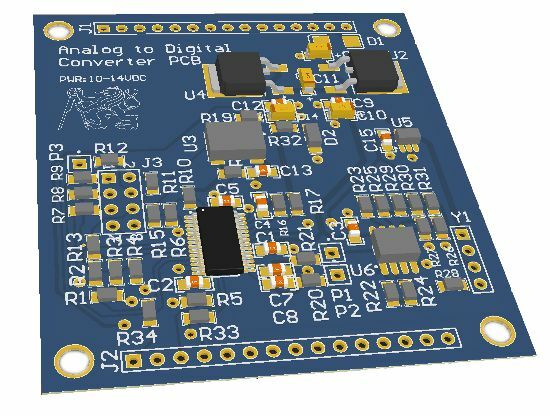
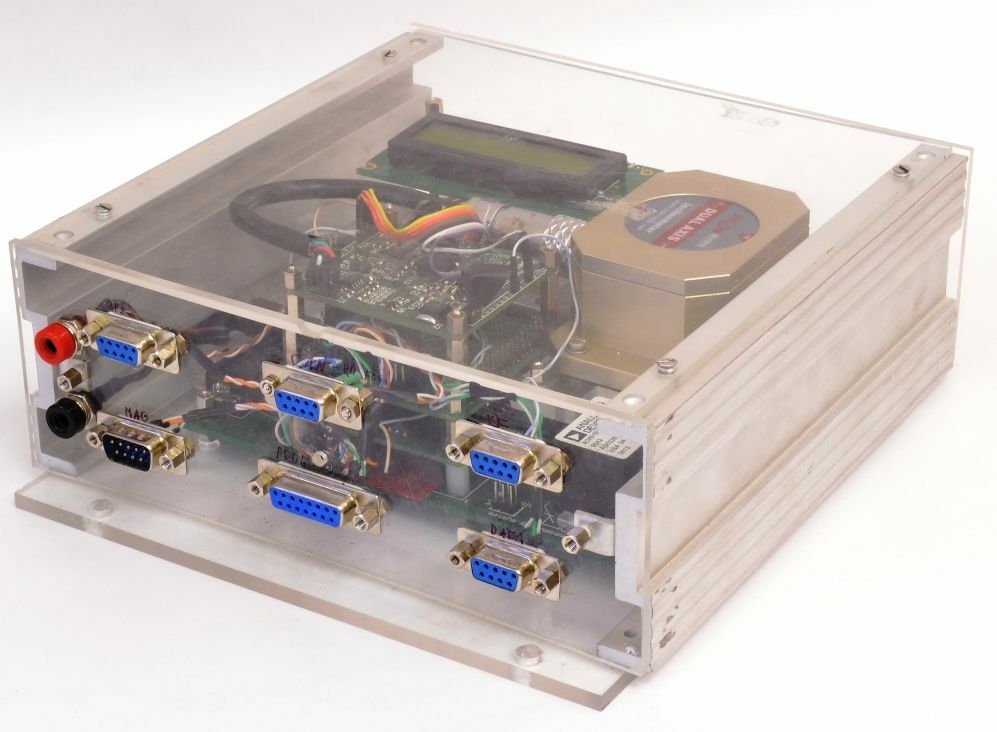
Obr. 8 - Systémy pro přesná měření úhlů náklonu, náklonoměr HCA528T (vlevo), DPS pro zpracování dat (uprostřed), autonomní systém pro měření pozice a orientace s optickým gyroskopem (vpravo)
Výzkumné skupiny

NavLIS - Navigační skupina laboratoře Leteckých Informačních Systémů
Výzkumné téma
Navigační systémySkupina se zaměřuje na výzkum a vývoj navigačních systémů a jejich algoritmů použitelných v širokém spektru aplikací, např. pro navigaci leteckých a pozemních prostředků, robotů, UAV, inteligentních detektorů kovů, hand-held zařízení, a to pomocí fúze dat z dostupných systémů (inerciálních senzorů, GNSS, inklinometrů, magnetometrů, kamer aj.). Snaží se zajistit dostatečnou přesnost určení orientace a pozice i při silných vibracích, rozdílné dynamice pohybu a vlivu okolí.
